
Assembled Spatial Structures
Computational design of robotically assembled spatial structures
A sequence based method for the generation
and evaluation of structures fabricated with
cooperating robots
Stelian Coros, [email protected], Computational Robotics Lab, ETH Zurich, Switzerland
Stefana Parascho, [email protected]
Thomas Kohlhammer, [email protected]
Fabio Gramazio, [email protected], Gramazio Kohler Research, ETH Zurich, Switzerland
Matthias Kohler, [email protected], ETH Zurich, Switzerland
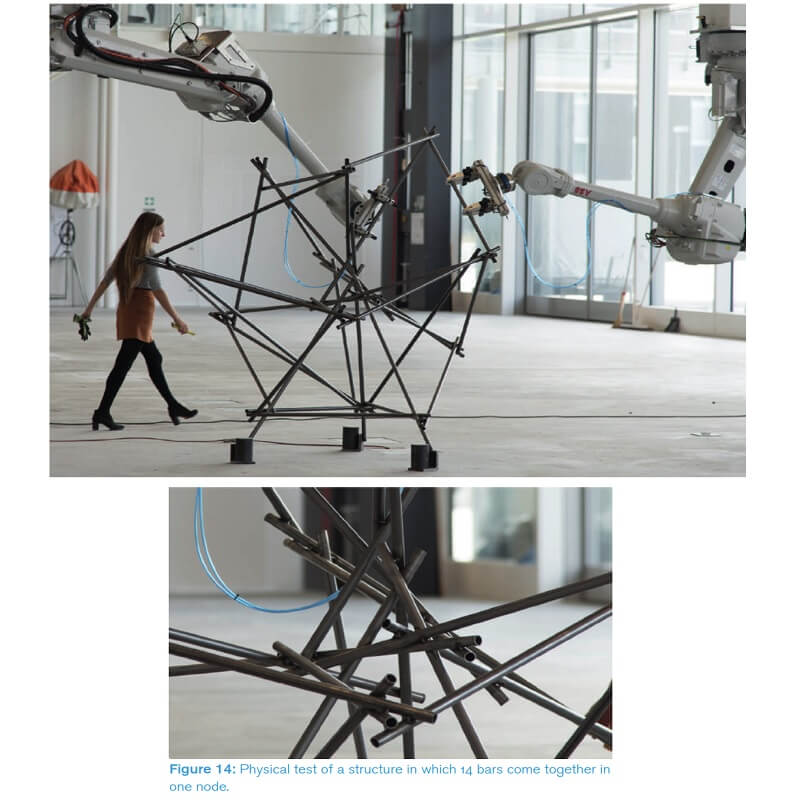
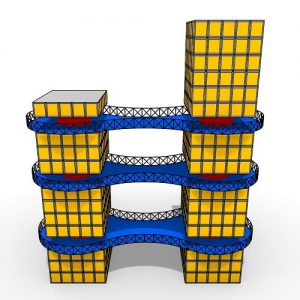
Cooperative robotic fabrication enables the development of new types of spatial structures, provided that assembly sequence and robot path-planning is considered in the design process early on. This paper by Stelian Coros, Stefana Parascho, Thomas Kohlhammer, Fabio Gramazio and Matthias Kohler, presents a design strategy for a lightweight steel structure assembled by two robots.
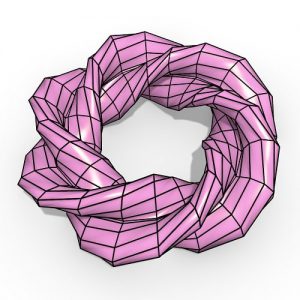
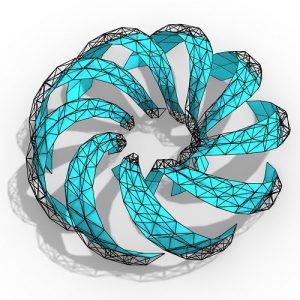
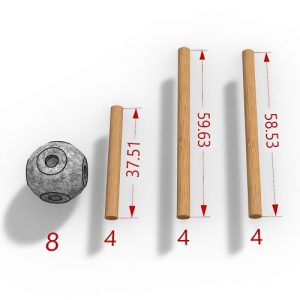
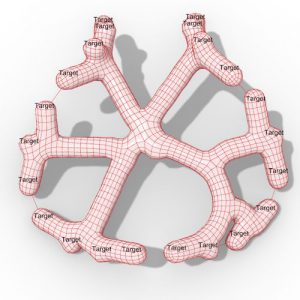
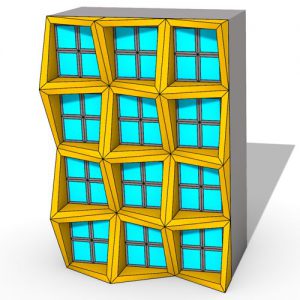
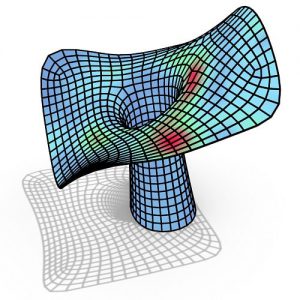
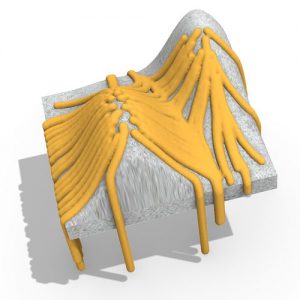
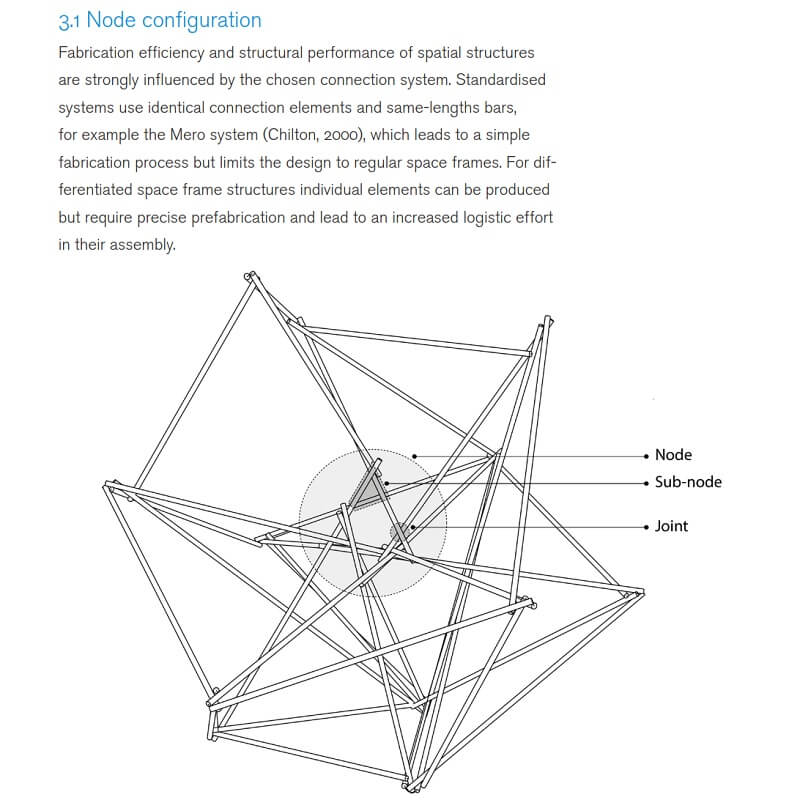 The developed structure describes a novel typology of spatial structures and consists of steel tubes that form spatial configurations through their three-dimensional aggregation. The bars are joined notch-free through welding and without additional connecting elements.
The developed structure describes a novel typology of spatial structures and consists of steel tubes that form spatial configurations through their three-dimensional aggregation. The bars are joined notch-free through welding and without additional connecting elements.
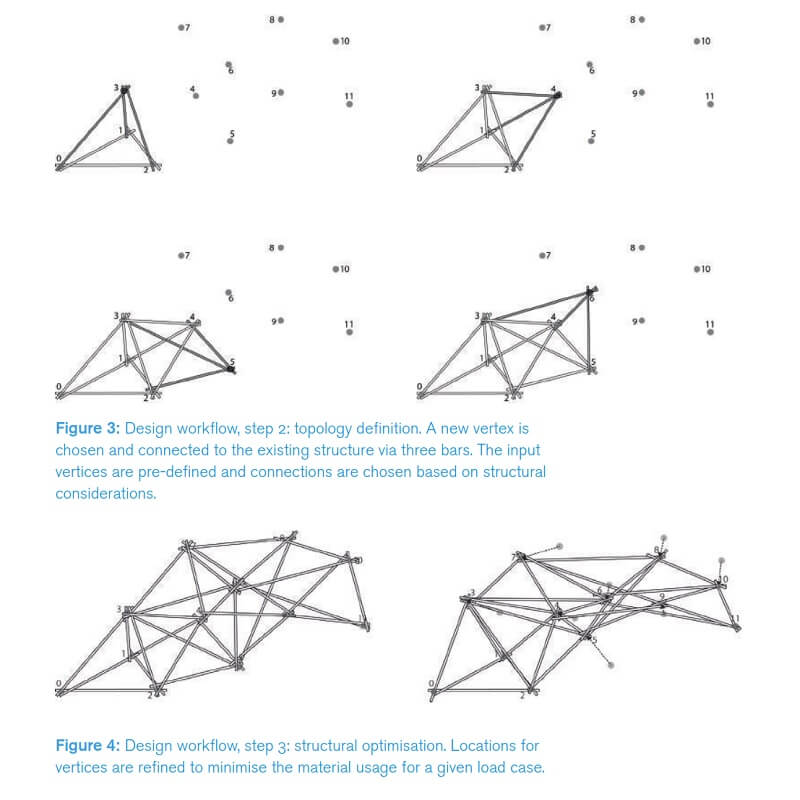
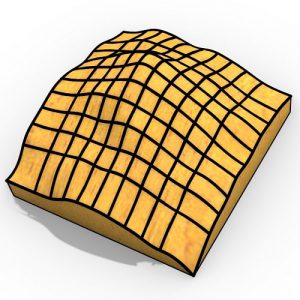
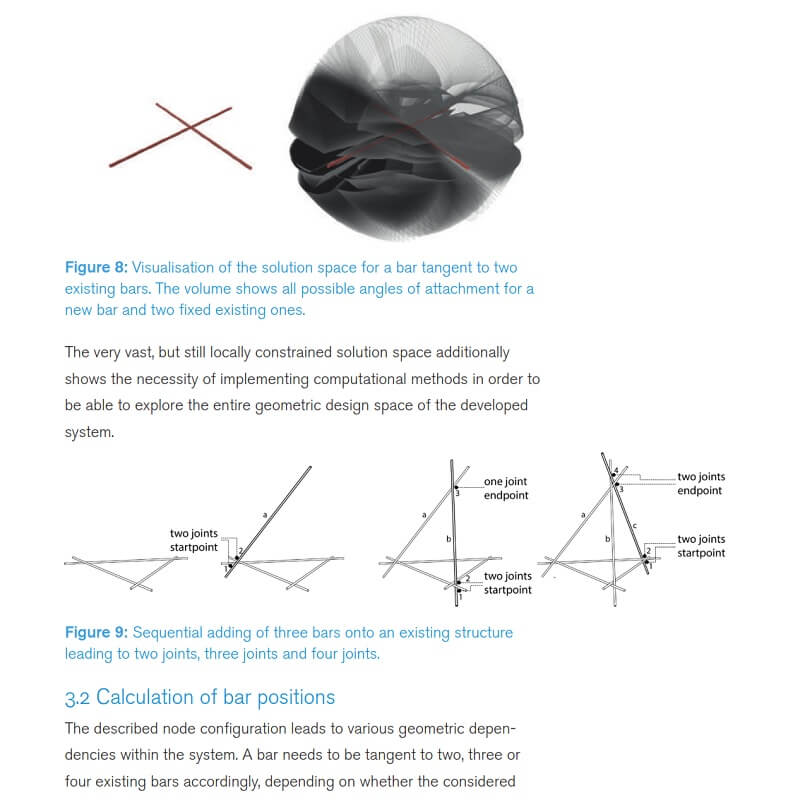 Besides fabrication-driven constraints, the design process is informed by functional, geometric and structural parameters. The paper presents the development of a novel connection system and the resulting dependencies for the geometric and structural system, as well as a four-step computational design method that allows to explore a large area of the design space of such structures.
Besides fabrication-driven constraints, the design process is informed by functional, geometric and structural parameters. The paper presents the development of a novel connection system and the resulting dependencies for the geometric and structural system, as well as a four-step computational design method that allows to explore a large area of the design space of such structures.
 Optimisation methods are employed to solve the complex dependencies of the presented structures and find a valid design.
Optimisation methods are employed to solve the complex dependencies of the presented structures and find a valid design.







Comments