
Deployable Structures
Deployable Structures
Andrea E. Del Grosso, 1,a
Paolo Basso, 2,b
1, University of Genoa, DICAT, Via Montallegro 1, 16145 Genoa, Italy
2, University of Pavia, Dep. of Structural Mechanics, Via Ferrata 1, 27100 Pavia, Italy
a, [email protected],
b, [email protected]
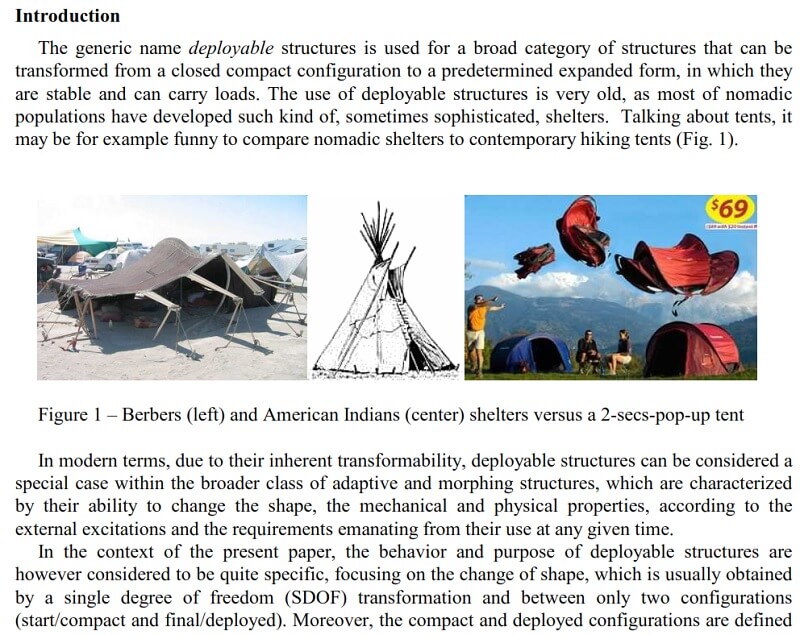
In the context of the present paper by Andrea E. Del Grosso and Paolo Basso, the behavior and purpose of deployable structures are considered to be quite specific, focusing on the change of shape, which is usually obtained by a single degree of freedom (SDOF) transformation and between only two configurations (start/compact and final/deployed). Moreover, the compact and deployed configurations are defined a priori and thus the structure is not conceived to respond or adapt to real-time changing scenarios, nor is designed to be used with different conditions in a same context.

On the contrary, the conception of a deployable structure looks towards two different uses in two different contexts, the first being the transportation or erection of the structure and the latter its static and functional behavior when deployed. The interest in deployable structures is then due to their promising applications and to the advantages they offer compared to conventional, non-deployable structures for certain type of applications, particularly for temporary construction and movable roofing systems, or for other needs in the aerospace industry.

For such applications their potential for compact storage, transportability and easy erection and dismantling is of primary importance and outweighs the restrictions imposed by the need for complex design and detailing, which are necessary to achieve deployability.






Comments