
Machinic Morphospaces
Machinic Morphospaces: Biomimetic Design Strategies for the Computational Exploration of Robot Constraint Spaces for Wood Fabrication
Tobias Schwinn, Institute for Computational Design University of Stuttgart
Oliver David Krieg, Institute for Computational Design University of Stuttgart
Professor Achim Menges, Institute for Computational Design University of Stuttgart
Boyan Mihaylov, Institute for Computational Design University of Stuttgart
Steffen Reichert, Institute for Computational Design University of Stuttgart

This paper by Tobias Schwinn, Oliver David Krieg, Achim Menges, Boyan Mihaylov and Steffen Reichert presents research into computational design processes that integrate not only criteria of physical producibility but also characteristics of design intelligence and performance.
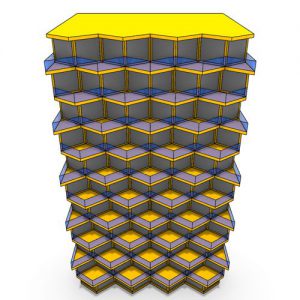
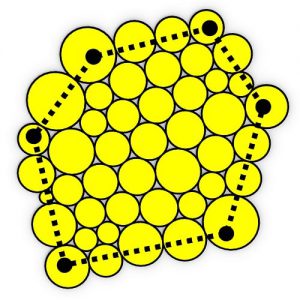
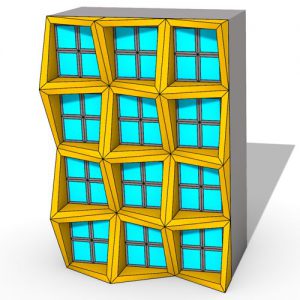
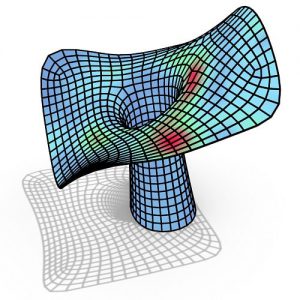
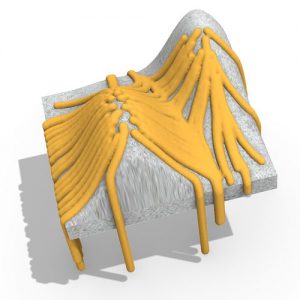
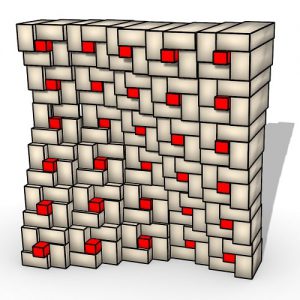
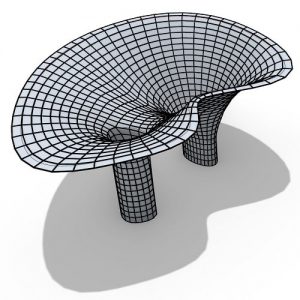
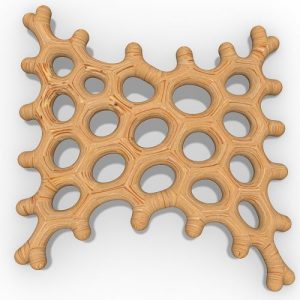
In the first part, the use of an industrial robot’s design space for developing differentiated finger joint connections for planar sheets of plywood is introduced. Subsequently, biomimetics is proposed as a filter for the possible geometric differentiations with respect to performative capacities.
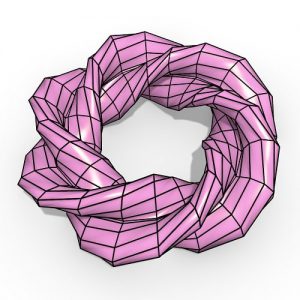
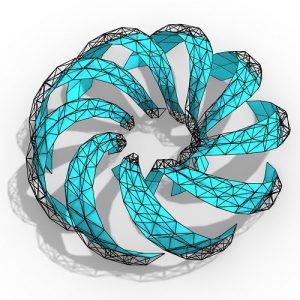
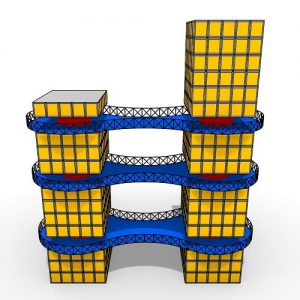
The second part focuses on the integration of fabricational and biomimetic principles with structural and architectural demands, as well as the development of a custom digital data structure for the fabrication of finger joint plate structures resulting in the construction of a full-scale prototype.

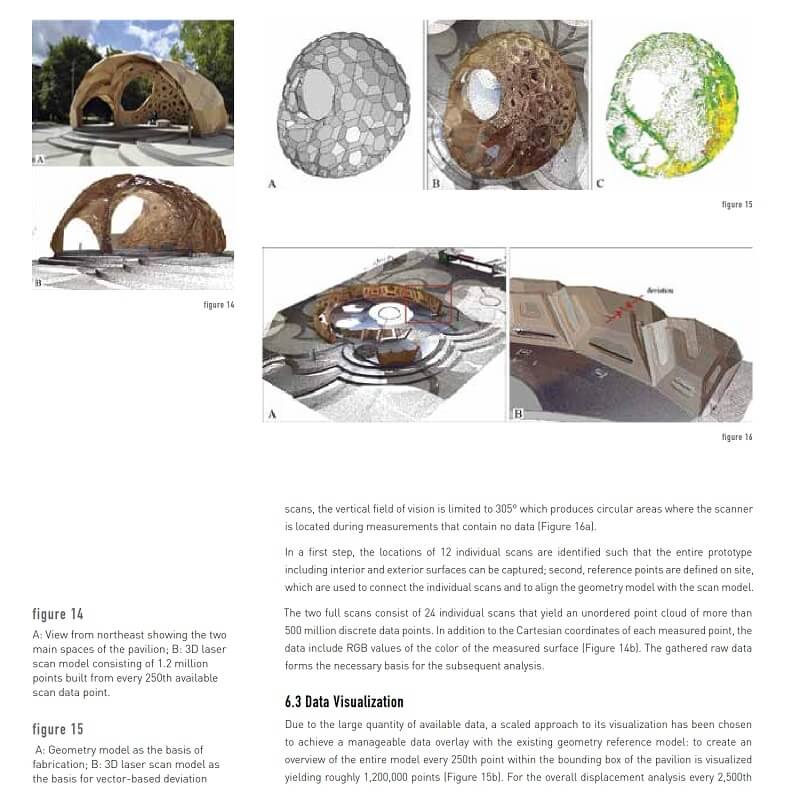
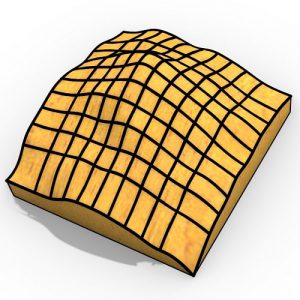
The paper concludes with an evaluation of the tolerances inherent in construction through 3D laser scan validation of the physical prototype.






Comments