
Robotic Constraints
Robotic Constraints Informed
Design Process
Pradeep Devadass, Tobias Heimig, Sven Stumm, Ethan Kerber and Sigrid Brell-Cokcan
Chair for Individualized Production, RWTH Aachen University Germany
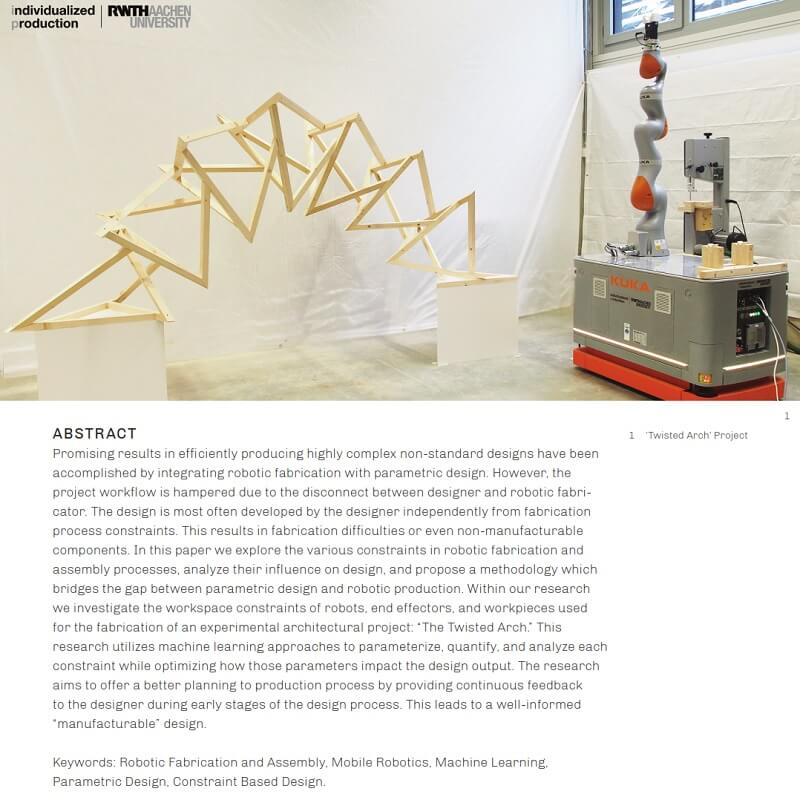
Promising results in efficiently producing highly complex non-standard designs have been accomplished by integrating robotic fabrication with parametric design. However, the project workflow is hampered due to the disconnect between designer and robotic fabricator. The design is most often developed by the designer independently from fabrication process constraints. This results in fabrication difficulties or even non-manufacturable components.
 In this paper by Pradeep Devadass, Tobias Heimig, Sven Stumm, Ethan Kerber and Sigrid Brell-Cokcan, authors explore the various constraints in robotic fabrication and assembly processes, analyze their influence on design, and propose a methodology which bridges the gap between parametric design and robotic production.
In this paper by Pradeep Devadass, Tobias Heimig, Sven Stumm, Ethan Kerber and Sigrid Brell-Cokcan, authors explore the various constraints in robotic fabrication and assembly processes, analyze their influence on design, and propose a methodology which bridges the gap between parametric design and robotic production.
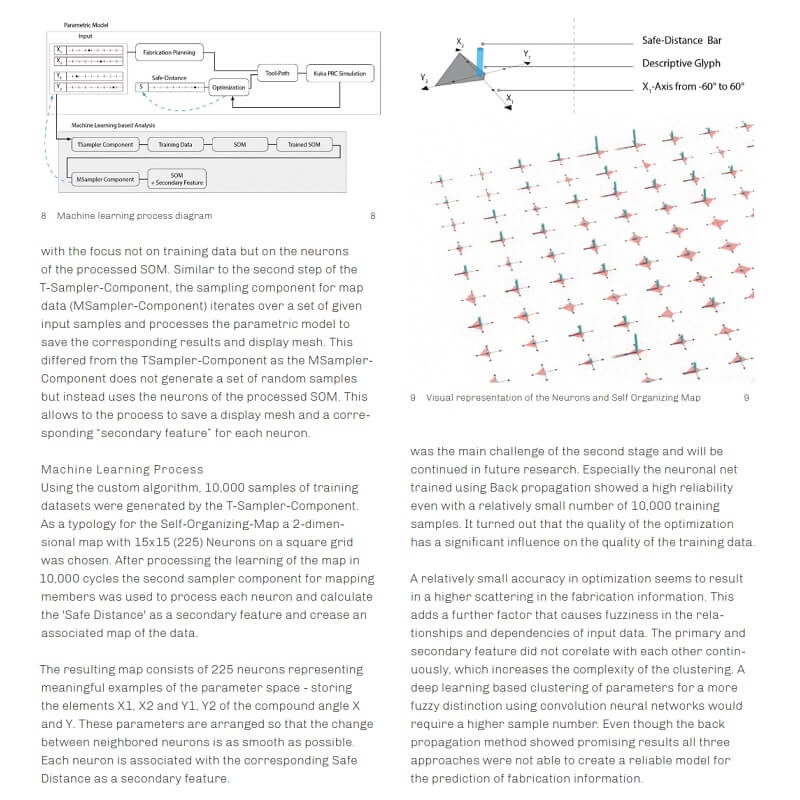
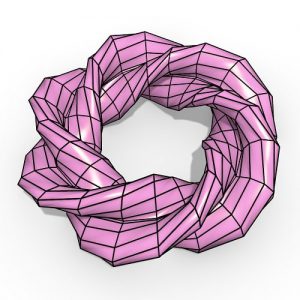
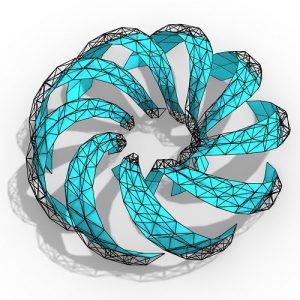
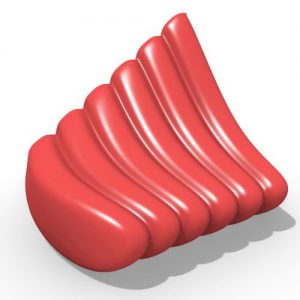
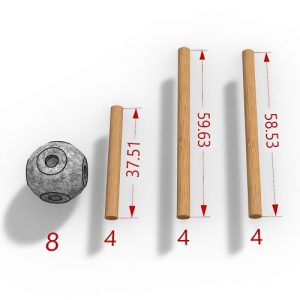
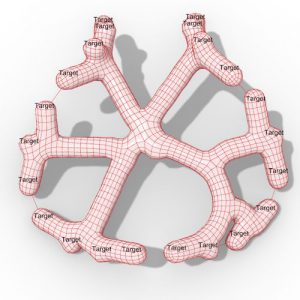
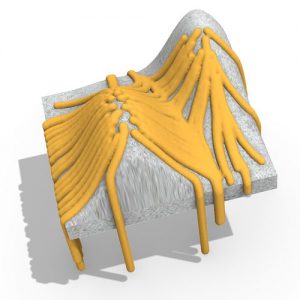
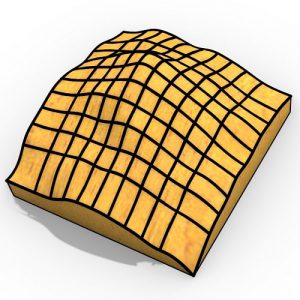
 Within this research authors investigate the workspace constraints of robots, end effectors, and workpieces used for the fabrication of an experimental architectural project: “The Twisted Arch.” This research utilizes machine learning approaches to parameterize, quantify, and analyze each constraint while optimizing how those parameters impact the design output.
Within this research authors investigate the workspace constraints of robots, end effectors, and workpieces used for the fabrication of an experimental architectural project: “The Twisted Arch.” This research utilizes machine learning approaches to parameterize, quantify, and analyze each constraint while optimizing how those parameters impact the design output.
 The research aims to offer a better planning to production process by providing continuous feedback to the designer during early stages of the design process. This leads to a well-informed “manufacturable” design.
The research aims to offer a better planning to production process by providing continuous feedback to the designer during early stages of the design process. This leads to a well-informed “manufacturable” design.






Comments