Sustainable Fabrication
The aim of this doctoral thesis by Isolda Agusti Juan, is to identify the sustainability risks and opportunities associated with the implementation of digital fabrication in construction.


The aim of this doctoral thesis by Isolda Agusti Juan, is to identify the sustainability risks and opportunities associated with the implementation of digital fabrication in construction.

A renewed interest in stereotomy, narrowly entwined with digital technologies, has allowed for the recovery and proposal of new techniques and expressions in this building approach.
This study by Fay Al Khalifa investigates using a spatial installation project on the ability of fourth-year architecture students to understand and recall complex philosophical ideas related to architecture and urbanism.
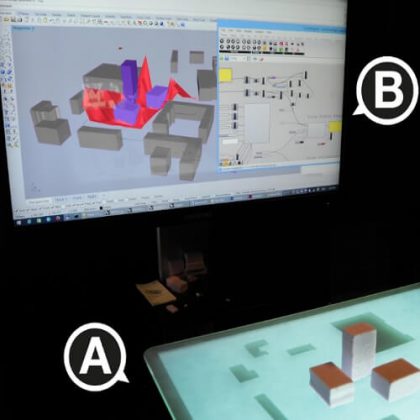
In this paper by Boris Plotnikov, Gerhard Schubert and Frank Petzold, A design platform has been developed which supports a seamless connection between freely shaped physical models, GIS data and Grasshopper3D.