

Ceiling Lamp Particles
In this Grasshopper example file you can use the Culebra plugin to simulate the flocking behaviour o...

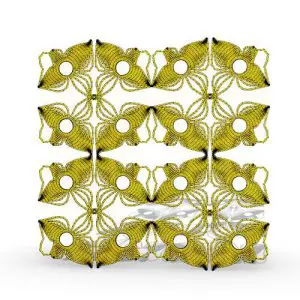
Decorative Room Divider
In this Grasshopper example file you can use the Nursery plugin to simulate a series of random field...
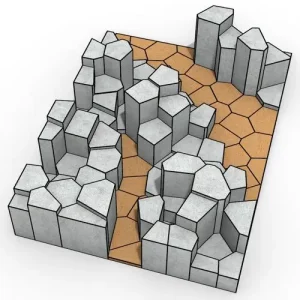
Field Carving
In this Grasshopper example file, You can carve a field based pattern on a mesh using the Nursery an...

Field Dome
In this Grasshopper example file, you can create a parametric field based pattern on a dome using th...

Field on Sphere
In this Grasshopper example file You can use the Nursery plugin to simulate a set of fields on a mes...
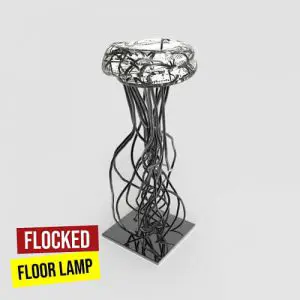
Flocked Floor Lamp
In this grasshopper example file you can use the agent-based modeling plug-in “culebra” to run a flo...
Force Field Lines
In this Grasshopper example file you can use the field component to design a parametric 2D pattern.
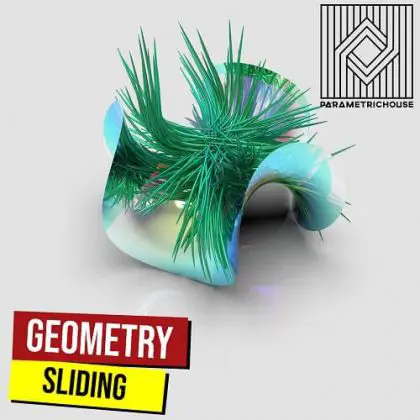
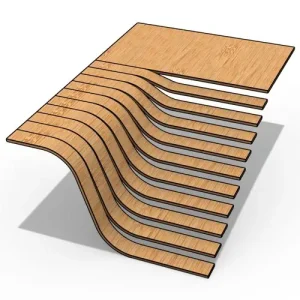
Geometry Slide
In this grasshopper definition we have used the Boid plugin and Nursery plugin combined to simulate...
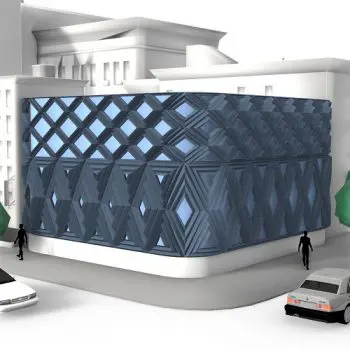
John Lewis Facade
In this Grasshopper Example File, you ca model a parametric facade similar to the John Lewis center.
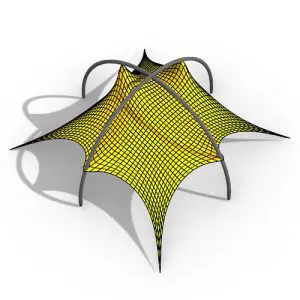
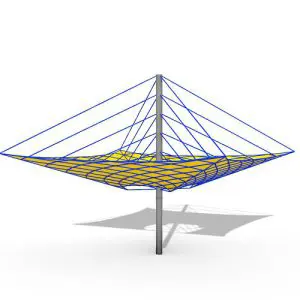
Kangaroo Tensile Structure
In this Grasshopper example file you can use the Kangaroo 2 Plugin to model a tensile mesh by moving...
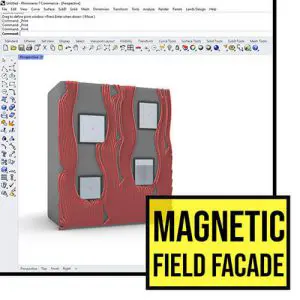
Magnetic Field Facade
In this Rhino Grasshopper example file, You can design a parametric facade by defining force fields....

Mesh force field
In this grasshopper definition we have used a mesh to create a force field using the Nursery plugin.

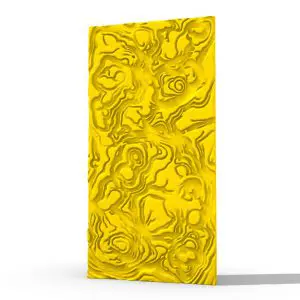
Mesh Noise Carving
In this Grasshopper example file you can create a Noise-based parametric mesh sphere using the Nurse...
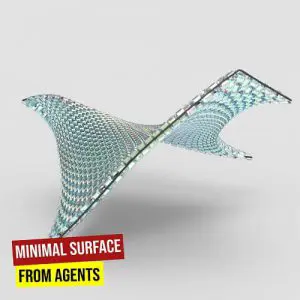
Minimal Surface from Agents
In this grasshopper example file you can use the Culebra plug-in to generate minimal surfaces.

Noise Force Field
In this grasshopper definition, we will use the Nursery plugin to simulate a force field which is ac...
Nursery Polar Fields
In this Grasshopper example file you can use the Nursery plugin to generate and simulate a set of po...

Plane Field
In this grasshopper definition, you can use the Nursery plugin to simulate a parametric freeform vec...
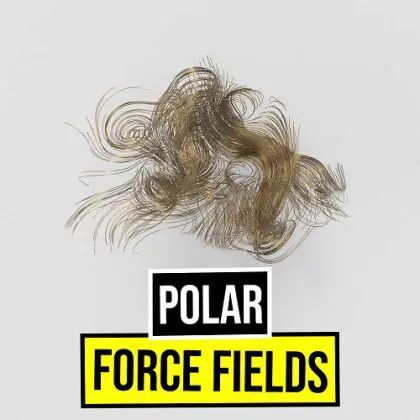
Polar Force Fields
In This grasshopper example file you can simulate a spinning field on a series of random points in a...
Retractable Shade
In this Grasshopper example file you can use the Minimal Surface Creator Plugin to model a retractab...

Spin Force Simulation
In this grasshopper example file you can simulate a spin force by defining a polar field.
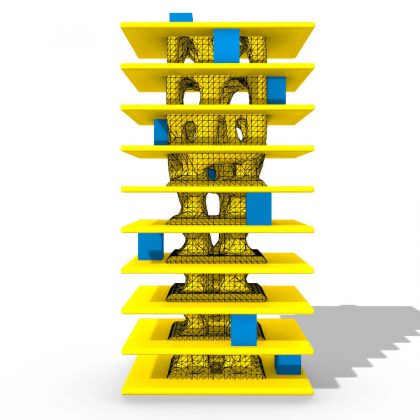
tOpos Building Slabs
In this Grasshopper example file you can use the tOpos plugin to generate an optimized central struc...

Voronoi Surface
In this Grasshopper example file you can use the native Grasshopper components combined with the Puf...