
Parametric Design furniture
Michaela Crie Stone lives and works in Rockport, Maine, where she creates pieces that push the parameters of function by blurring the lines between art, craft, and design.

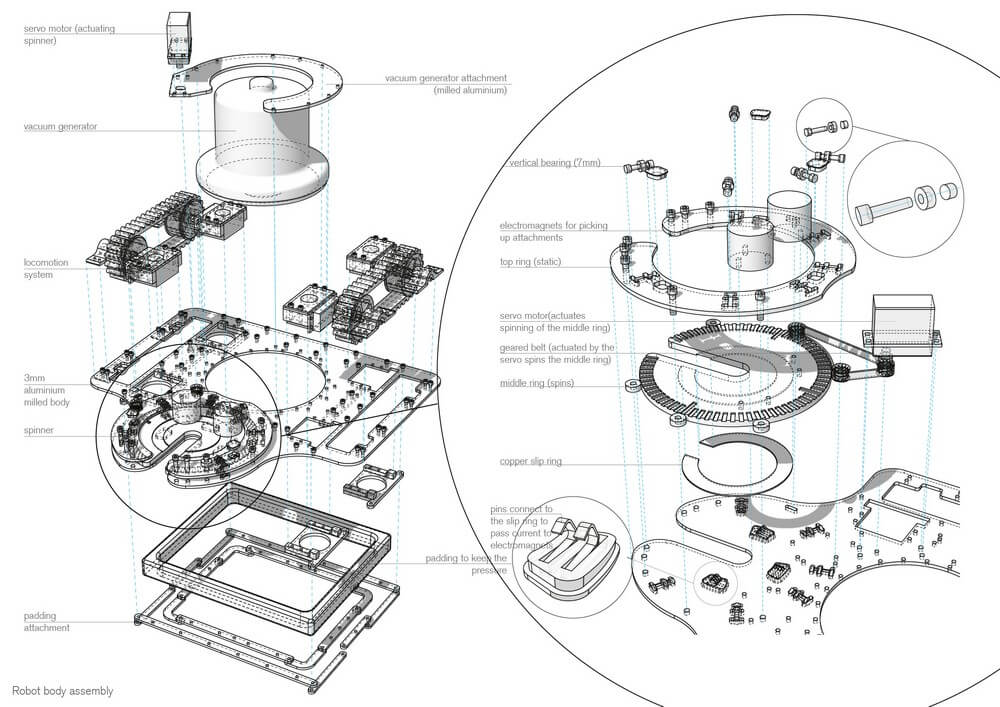
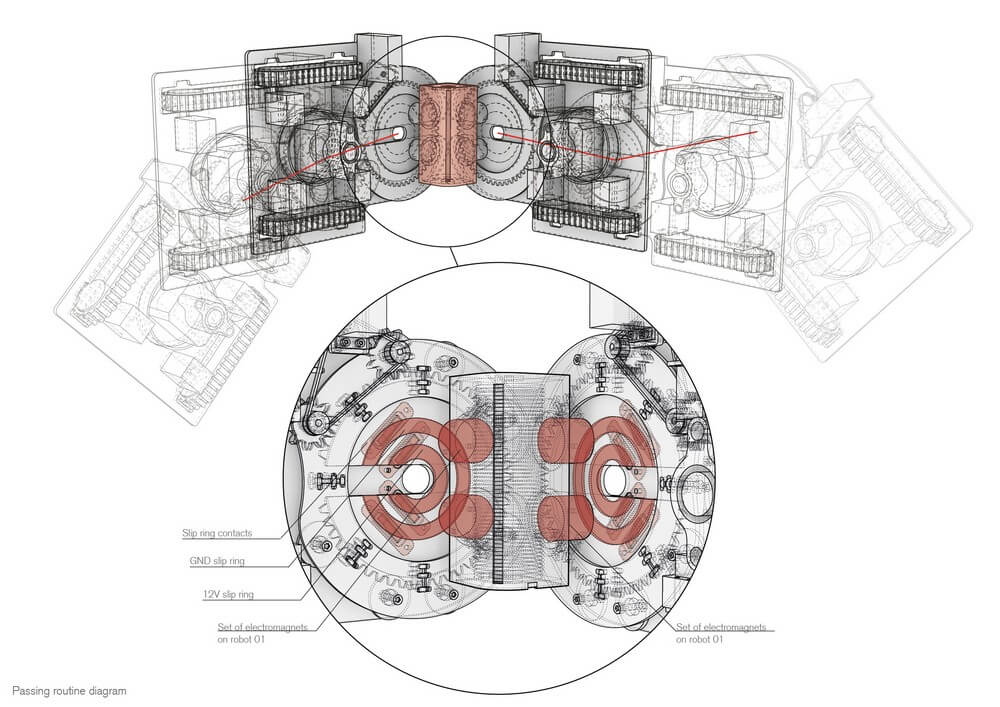
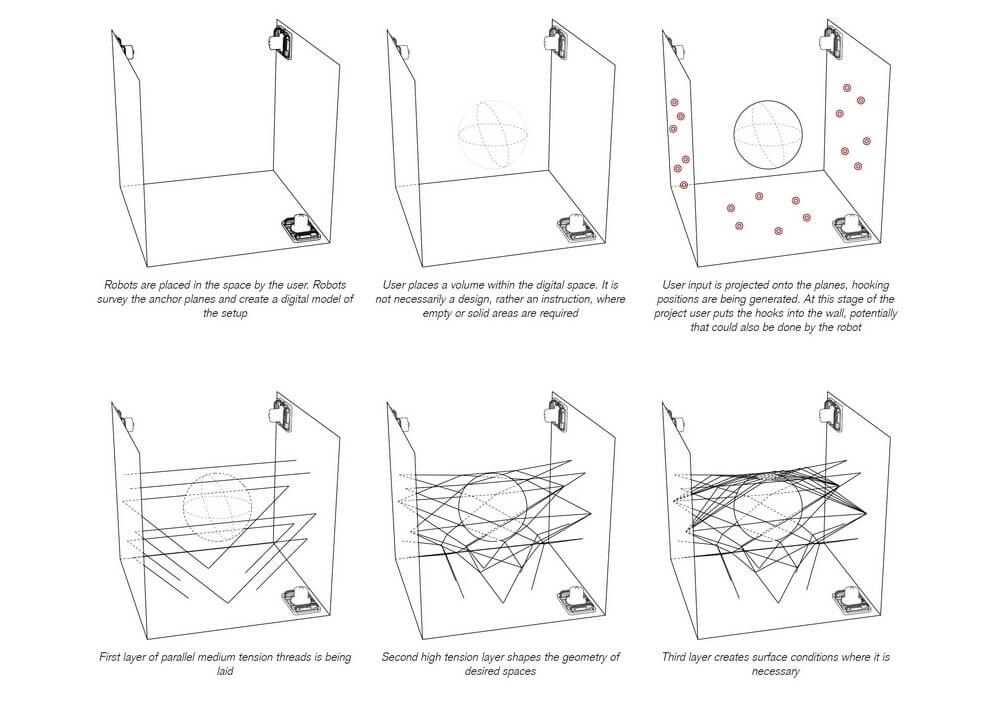
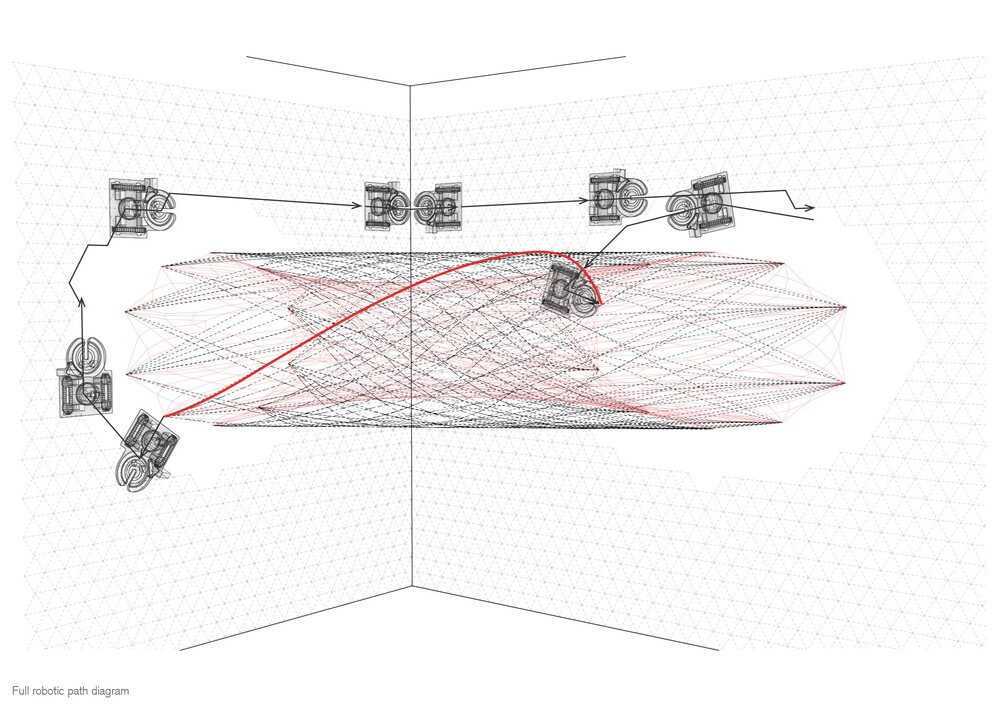
The project Mobile Robotic Fabrication System for Filament Structures by Maria Yablonina, demonstrates a new production process for filament structures. It proposes multiple semi-autonomous wall climbing robots to distribute fiber filament, using any horizontal or vertical surface, or even existing architecture, to support the new structures.

Compared to larger scale industrial robots that are limited by position and reach, these robots are enabled with movement systems and a collection of sensors that allow them to travel and interact accurately along typical ground, walls, roofs, and ceilings. One can imagine a fabrication process where an operator arrives to the scene with a suitcase housing all the necessary robots and materials to create a large structure.
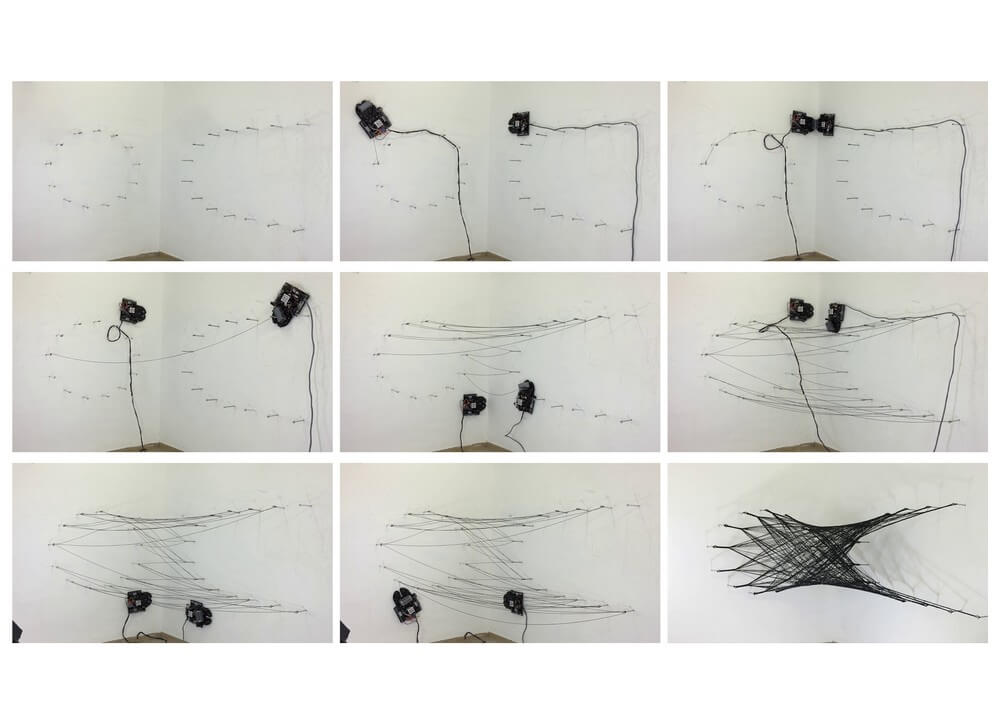
These agile mobile robotic systems move robotic fabrication processes beyond the constraints of the production hall, exposing vast urban and interior environments as potential fabrication sites.

Michaela Crie Stone lives and works in Rockport, Maine, where she creates pieces that push the parameters of function by blurring the lines between art, craft, and design.

in this video, you can look at different parametric towers with parametric designs.

Drone based technology is the solution to overcome the limitation of surface road capacity in cities.

Augmented reality (AR) is the integration of digital information with the user’s environment in real-time.







