
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

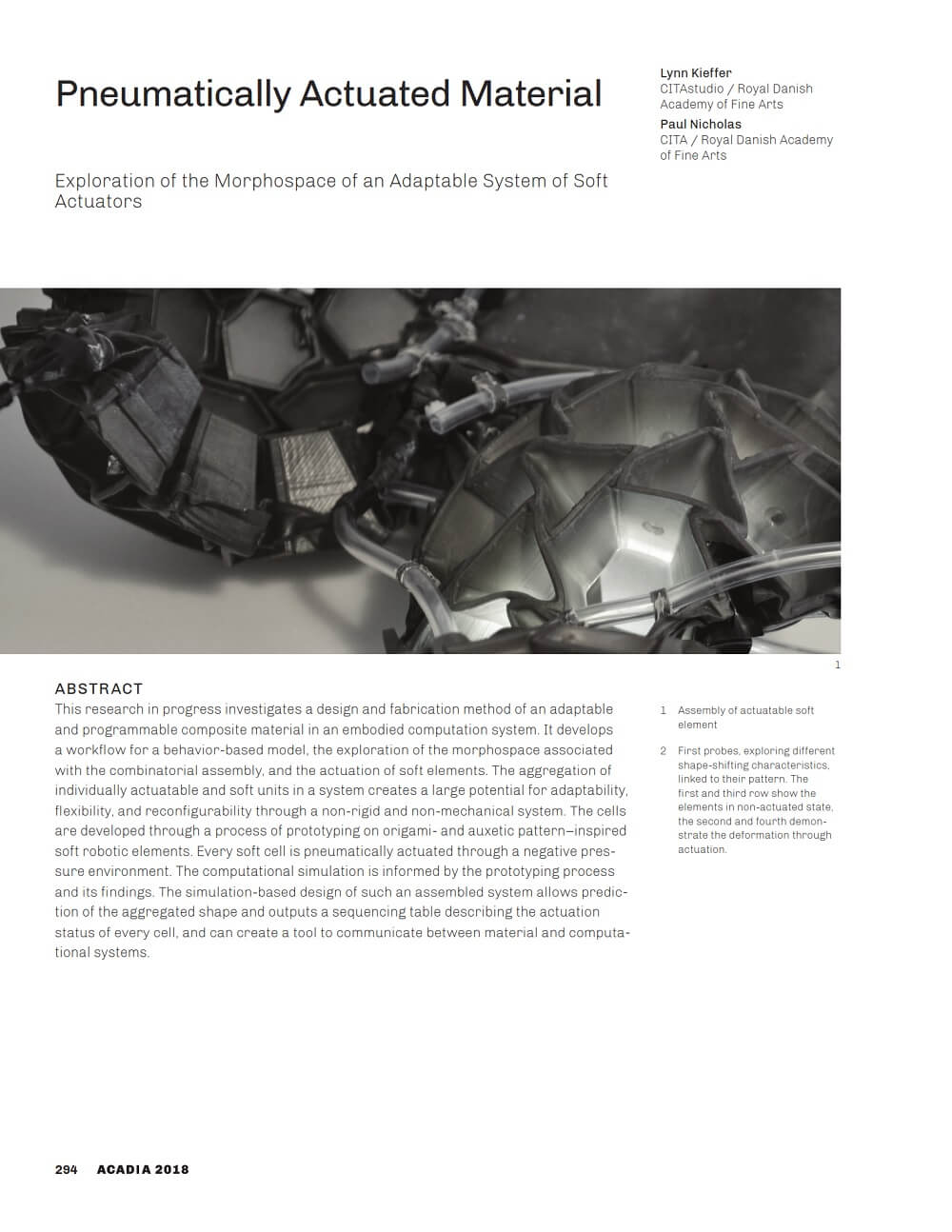
This research in progress by Lynn Kieffer and Paul Nicholas investigates a design and fabrication method of an adaptable and programmable composite material in an embodied computation system. It develops a workflow for a behavior-based model, the exploration of the morphospace associated with the combinatorial assembly and the actuation of soft elements. The aggregation of individually actuatable and soft units in a system creates a large potential regarding adaptability, flexibility and reconfigurability, through a non-rigid and non-mechanical system.
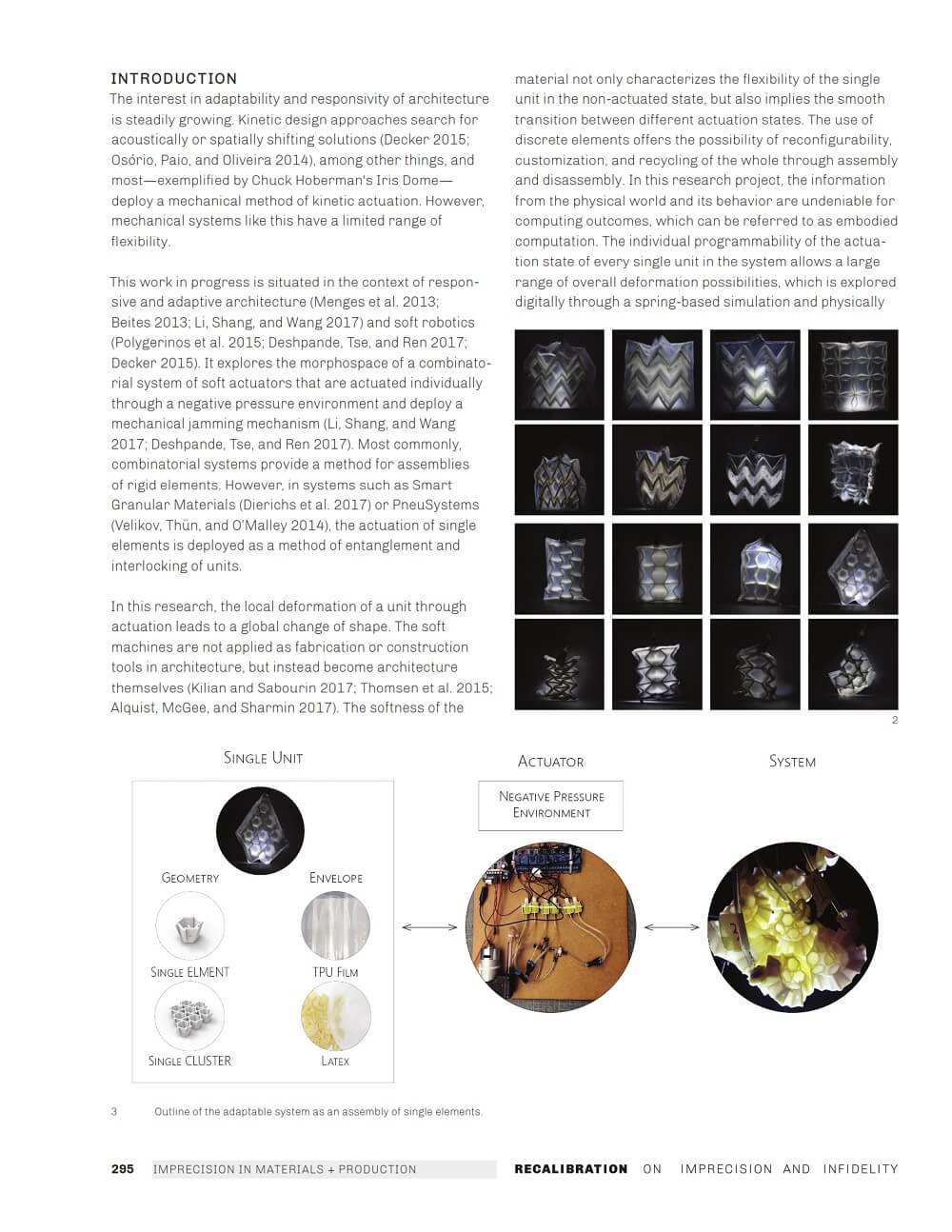
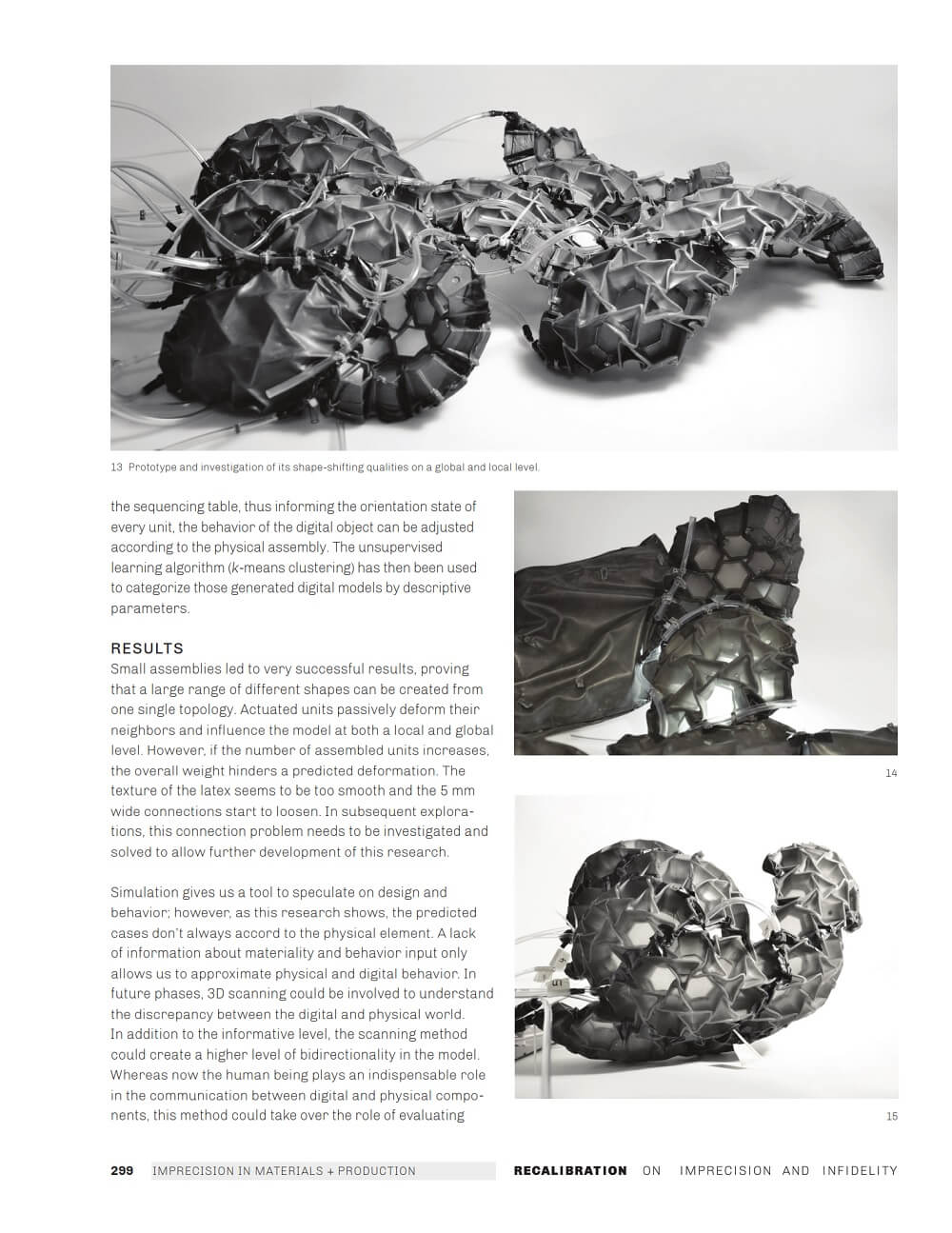
The cells are developed through a process of prototyping on origami and auxetic pattern inspired soft robotic elements. Every soft cell is pneumatically actuated through a negative pressure environment. The computational simulation is informed by the prototyping process and its findings. The simulation-based design of such an assembled system allows prediction of the aggregated shape and outputs a sequencing table, describing the actuation status of every cell and can create a tool to communicate between material and computational system.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







