
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
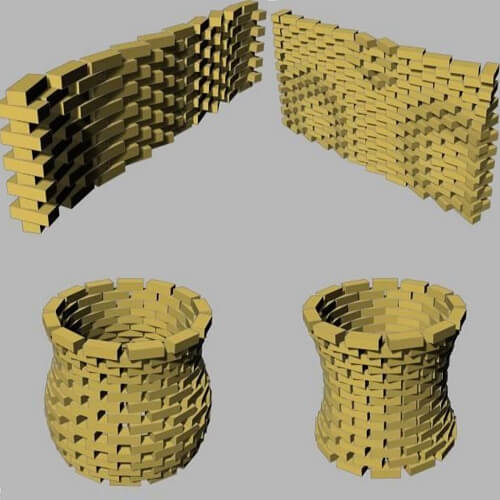
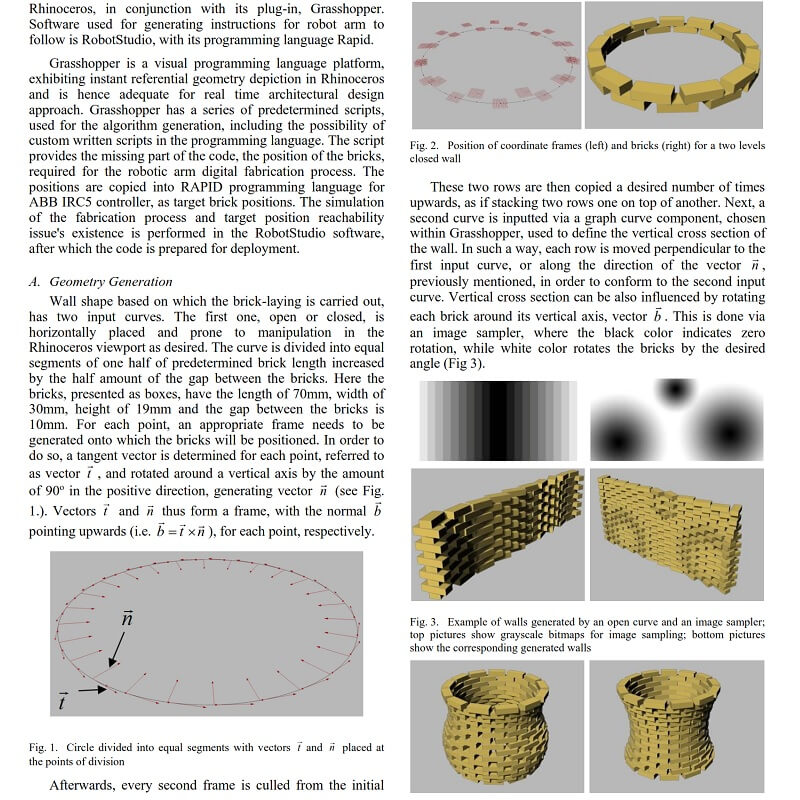
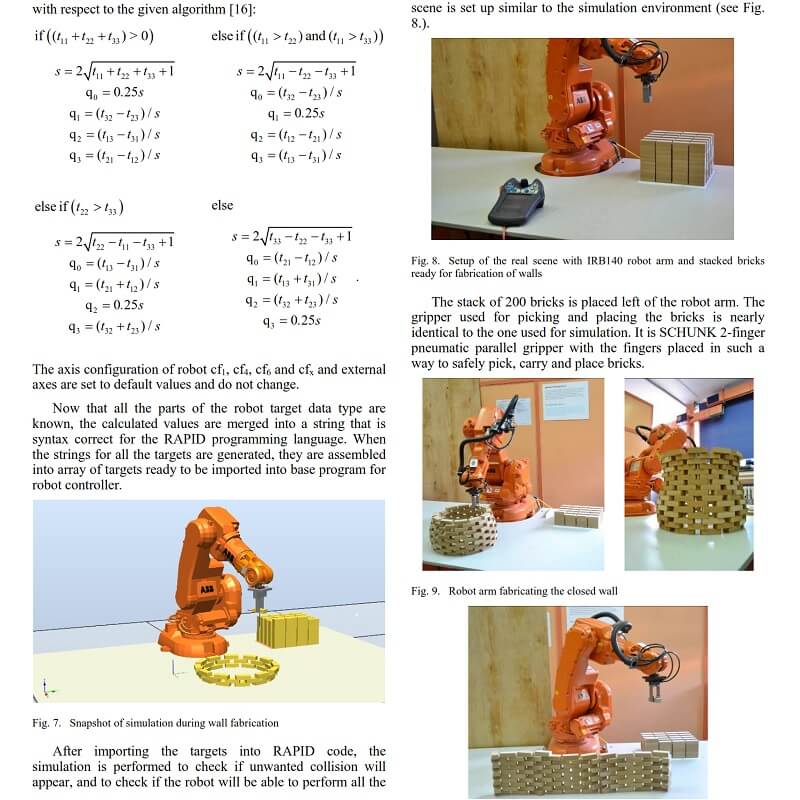
This paper by Mirko Raković, Branislav Borovac, Milutin Nikolić, Marko Jovanović, Bojan Tepavčević and Mladen Papović, presents methodology and implementation of parametric architectural design of bricklaying walls fabricated by industrial robotic arm. As a design tool Grasshopper is used, a visual programming editor that runs within the Rhinoceros 3D CAD application. Grasshopper offers a range of objects for creating parametric models including bricklaying walls. However it lacks the ability of integration with fabrication tools.
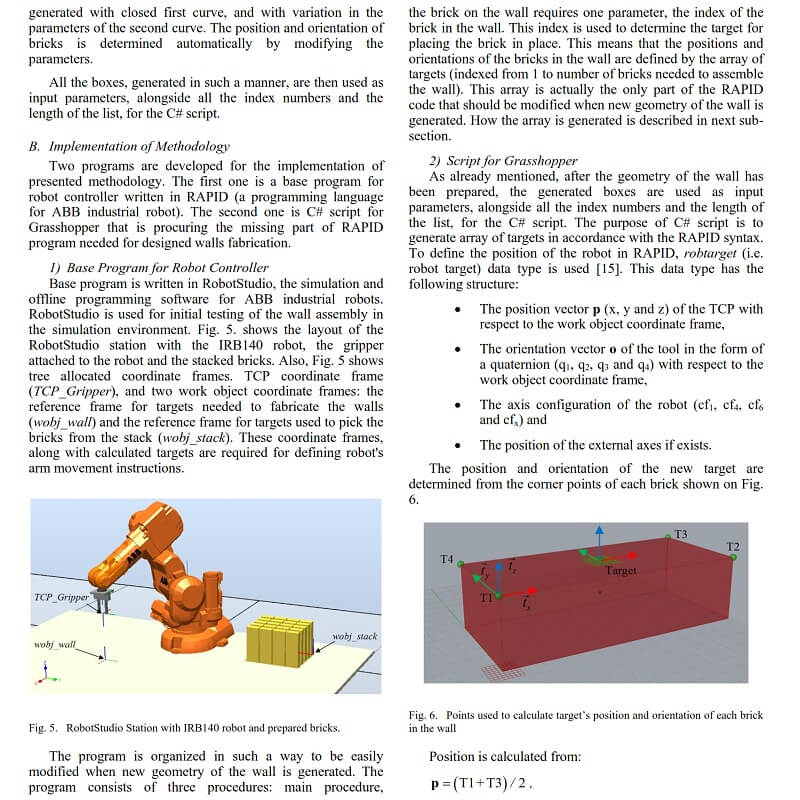 To overcome this problem, a custom C# script has been developed. As the fabrication tool, the ABB-IRB 140 robotic arm is used. Thus the C# script is written in such a way to obtain the RAPID code for controlling ABB industrial robots. The C# script enabled automated generation of RAPID code in accordance to the Grasshopper generated geometries of walls. The RAPID code is firstly tested in simulation environment, afterwards is used to control the robot to fabricate various types of walls.
To overcome this problem, a custom C# script has been developed. As the fabrication tool, the ABB-IRB 140 robotic arm is used. Thus the C# script is written in such a way to obtain the RAPID code for controlling ABB industrial robots. The C# script enabled automated generation of RAPID code in accordance to the Grasshopper generated geometries of walls. The RAPID code is firstly tested in simulation environment, afterwards is used to control the robot to fabricate various types of walls.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







