
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can


This thesis by Aleksandra Anna Apolinarska presents methods for designing novel types of timber bar structures arising from new robot-based fabrication and assembly processes. Specifically, the focus lies in load-bearing structures which: a) are made of many short, linear soft- wood elements joined with b) geometrically generic, notch-free and relatively low- performing timber-to-timber connections, and c) are inherently not constrained to a regular or repetitive build-up.
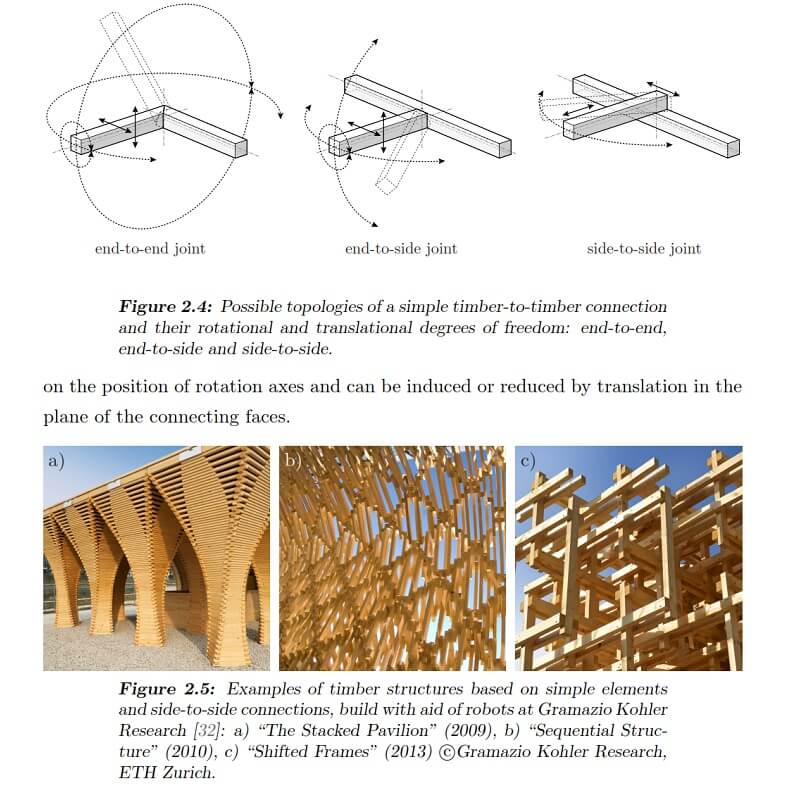
The resulting flexibility of such constructive systems not only offers applicability for free-form architectural designs but also holds potential to diversify geometry of individual elements according to their structural and fabricational demands. However, as exemplified by two case studies, this potential is challenged by the high level of complexity originating from an intricate interplay of geometry, material properties, structural phenomena and fabrication requirements.

This research has investigated these complex interrelations and developed appropriate tools to handle and exploit them in an architectural design process. First, computational methods for geometric modelling are presented, addressing specific design parameters of two exemplary topologies: layered truss-like beams and butt T-joint based structures.
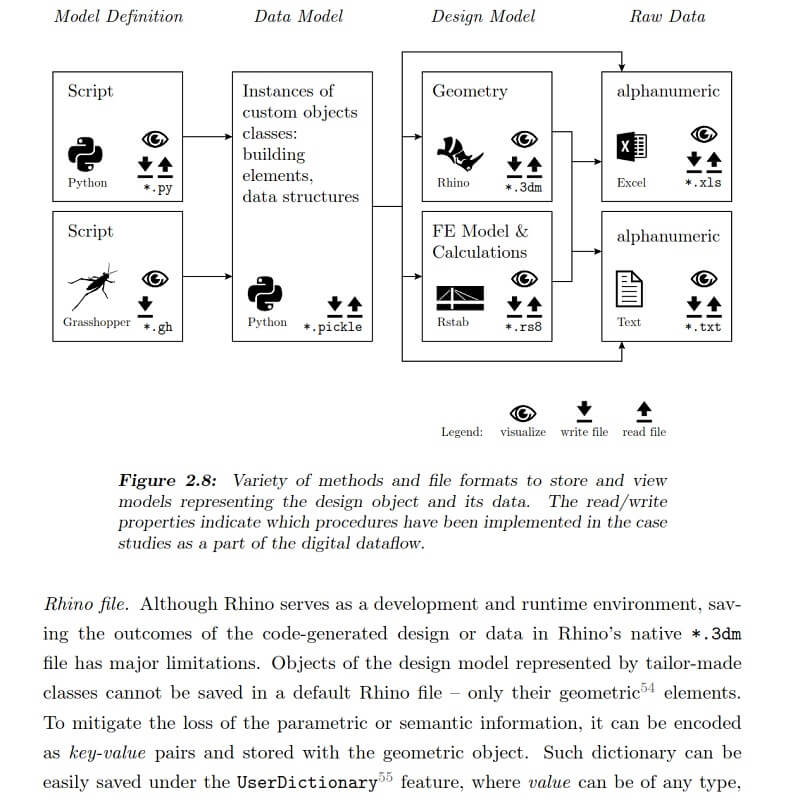
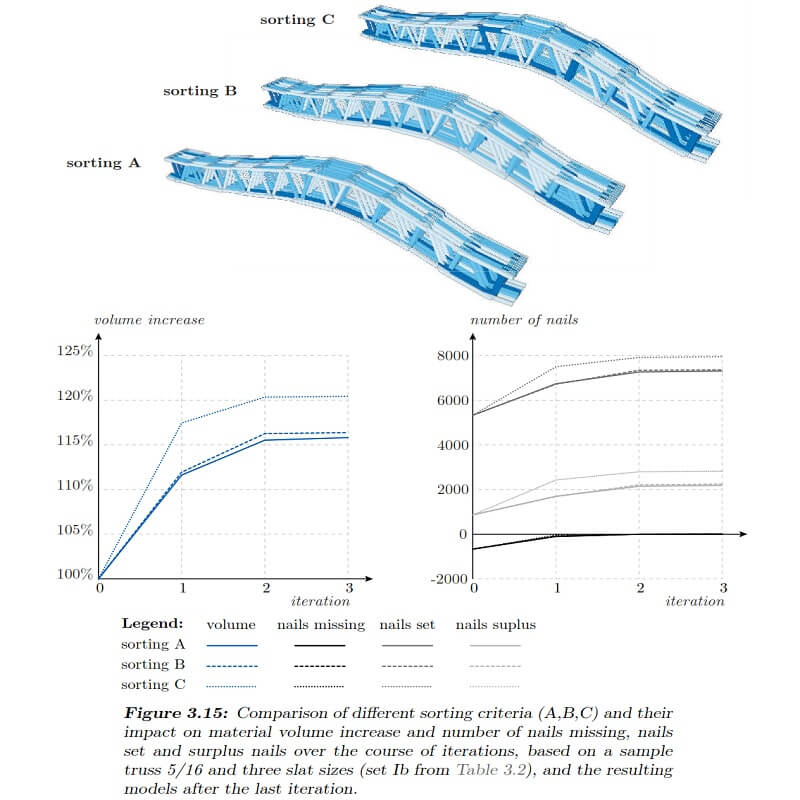
Second, interdisciplinary data- and workflows have been established to facilitate integration of further design aspects – fabrication and structural performance – and to investigate their interdependencies with geometric para- meters. Third, algorithmic strategies are proposed to process the data collected from different disciplines so that it can be used to inform and improve the design.
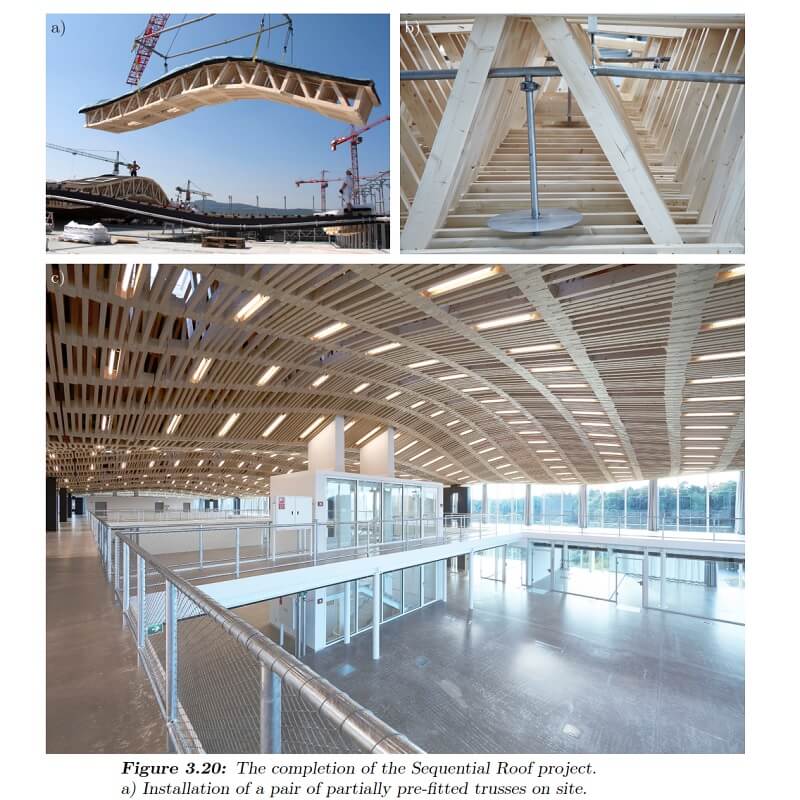
The relevance of this research is showcased by i.a. a large-scale architectural demonstrator, successfully developed using the presented tools and techniques and realized as a fully robotic construction project.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







