
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
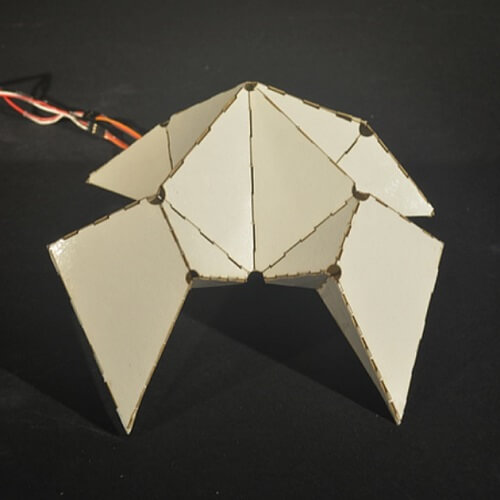
Robotics have expanded exponentially in the last decade. Within the vast examples of ambulatory robots, traditional legged robots necessitate engineering expertise and the use of specialized fabrication technologies. Micro electromechanical (MEM) robots are useful for a wide range of applications yet in most cases, difficult to fabricate and excessively intricate. Advances in pop-up laminate construction have generated a model shift in the development of robot morphologies due to their ease of fabrication and scalability from the millimeter to centimeter scale. This research by Olga Mesa, Saurabh Mhatre, Malika Singh and Dan Aukes continues to investigate the link between kinematics and pop-up origami structures in robotics. The objective was to design a robot that exhibited efficient and controlled locomotion minimizing number of motors.
“Crease”, an origami robot that emerges from a two-dimensional sheet into its three-dimensional configuration was developed. By amplifying a simple rotational motion through the geometry of folds in the robot, a complex gait was achieved with minimal motorized actuation. Variations in gait, control, and steering were studied through physical and computational models. Untethered Creases that sense their environment and steer accordingly were developed. This research contributes not only to the field of robotics but also to design where efficiency, adjustability and ease of fabrication are critical.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







