
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
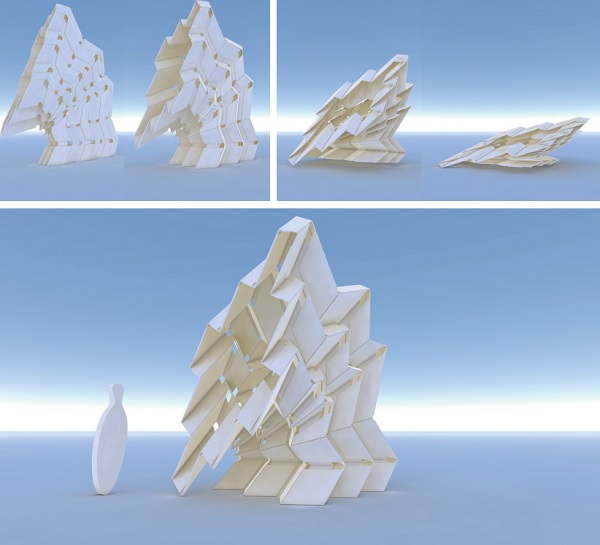
Freeform Rigid-Foldable Structure using Bidirectionally Flat-Foldable Planar Quadrilateral Mesh

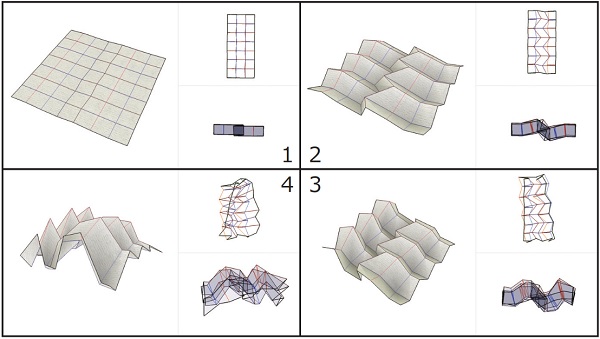
This paper presents a computational design method to obtain collapsible variations of rigid-foldable surfaces, i.e., continuously and finitely transformable polyhedral surfaces, homeomorphic to disks and cylinders.
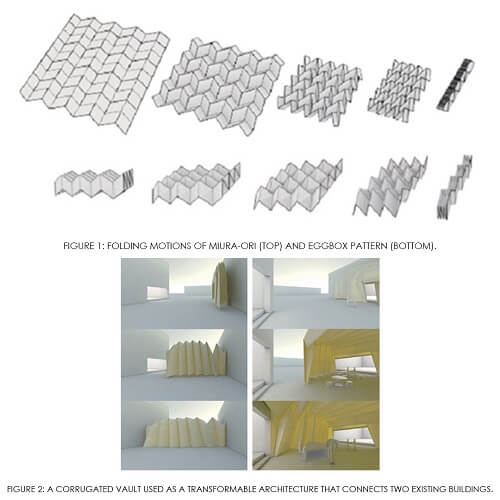
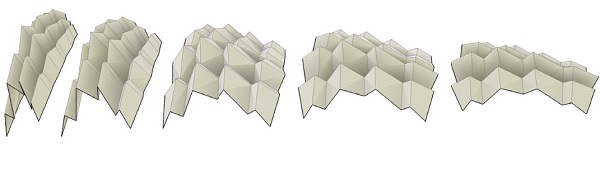
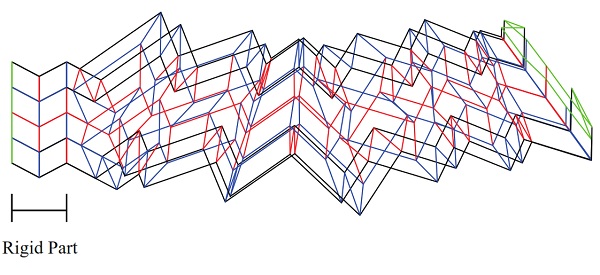
Two novel techniques are proposed to design such surfaces: a technique for obtaining a freeform variation of a rigid-foldable and bidirectionally flat-foldable disk surface, which is a hybrid of generalized Miura-ori and eggbox patterns, and a technique to generalize the geometry of cylindrical surface using bidirectionally flat-foldable planar quadrilateral mesh by introducing additional constraints to keep the topology maintained throughout the continuous transformation.
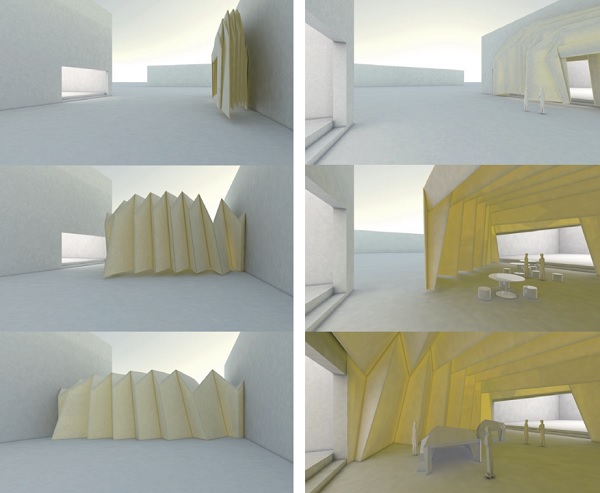
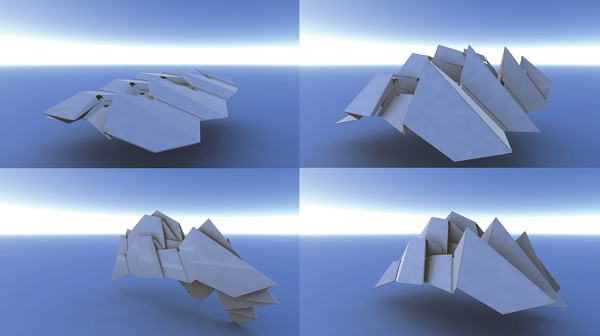
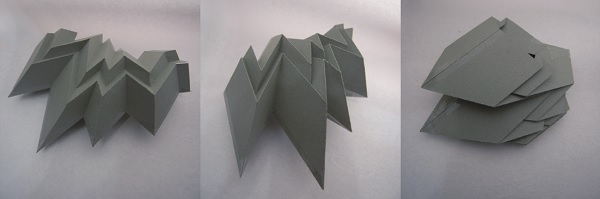
Proposed methods produce freeform variations of rigid-foldable structures that have not been realized thus far. Such a structure forms a one-DOF mechanism with two possible flat states. This enables the designs of deployable structures useful for packaging the boundary of architectural spaces, space structures, and so on.
A polyhedral surface composed of rigid facets connected by rotational edges forms a kinetic mechanism: a rigid folding mechanism. Several collapsible structures are proposed using this type of kinetic mechanism, such as Miura-ori [Miura 1980] and eggbox patterns.
In order to apply such kinetic surfaces to design purposes, it is required that we can control the three-dimensional shape of the surface and its behavior so that they are consistent with the design requirements.
Design requirements in architectural context include environmental conditions, functional requirements, configuration of surrounding buildings and structures, and user’s preference.
However, since the rigid-foldability of known surfaces strongly relies on the symmetry of the pattern, designing such structures could not be done in an ad-hoc approach; the geometric constraints must be generally investigated to solve an inverse problem of obtaining a pattern from the resulting form and behavior.
The objective of our study is thus to freely design kinetic forms using design methods based on computational geometry.
As the first step to achieve this goal, the author proposed a freeform design method of kinetic structures based on origami (developable surface) to provide design variations of Miura-ori through an interactive design system in which a user can deform the surface freely while sustaining the rigid-foldability of the surface ([Tachi 2009a]).
This method yields variations of rigid-foldable origami models that have never been achieved otherwise, however, the method was not general enough for design applications, especially of architecture, since the developability condition used is not always an essential condition when we construct structures from multiple parts.
In particular, this developability condition disables the design of rigidfoldable collapsible cylinders, realization of which can contribute the designs of surrounding of a volume of a space, collapsible containers, compound surface structures, and so on. This limitation mainly comes from the fact that a cylindrical surface cannot have a globally developed state under the conventional definition.
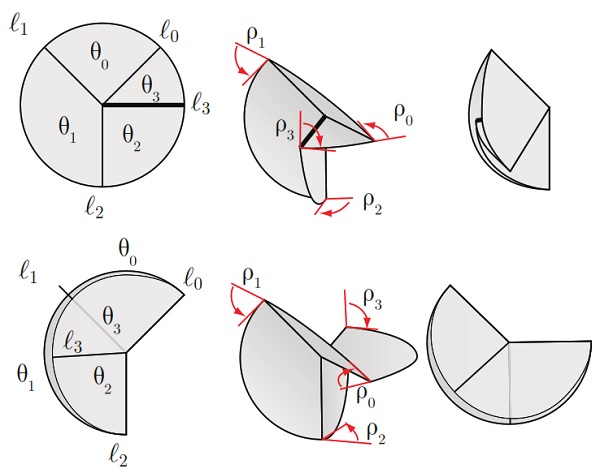
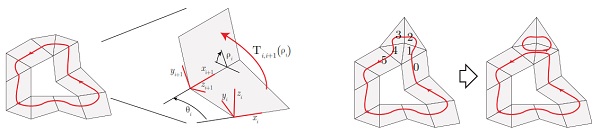
This paper provides a novel method that enables a freeform variation of such rigidfoldable structure, not restricted by the developability of the surface or the disk topology. We will solve this design problem by extending and combining the ideas of generalized Miura-ori [Tachi 2009a] (or flat-foldable 4-valent-vertex origami) and generalized eggbox pattern (or discrete Voss surface) [Schief et al. 2007] to produce bidirectionally flat-foldable planar quadrilateral mesh.
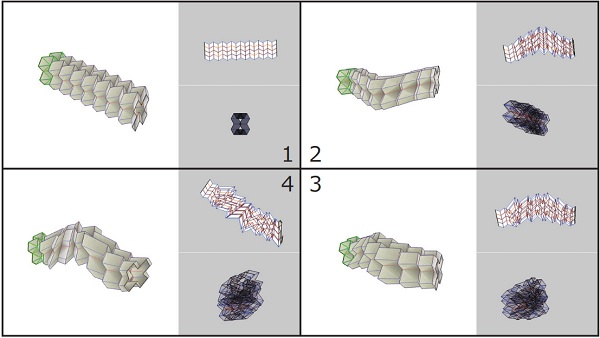
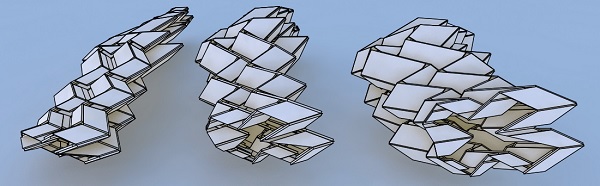
Such a mesh has nice generalized characteristics: it is bidirectionally flat-foldable and produces one-DOF mechanism. Required design condition is loose compared to purely developable surface and it allows asymmetric and cylindrical variations. We will show a novel design method to obtain rigid-foldable collapsible cylinders by deforming symmetric rigid-foldable cylinders of [Tachi 2009b] into asymmetric ones.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







