



3D Puzzle
In this grasshopper example file you can model a laser-cut optimized 3D-Puzzle and also extract the...
Bin Packing Nesting
In this Grasshopper tutorial, you will learn how to place contour sections inside a group of rectang...

Book Stand
In this Grasshopper example file, you can design a tilted book stand parametrically. It also generat...
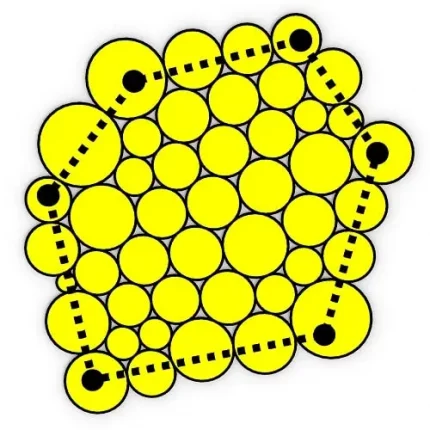
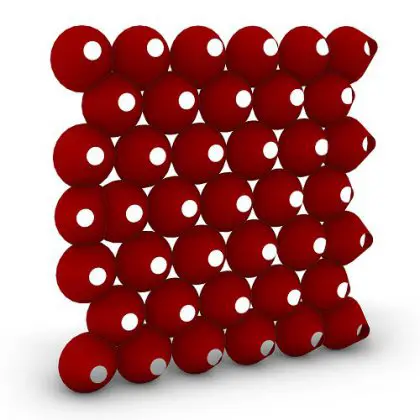
Circle Pack Mesh
In this Grasshopper Kangaroo example file, you can circle pack a mesh using the "TangentIncircles" c...
Circular Extrusions
In this Grasshopper tutorial for beginners, you will learn how to create a parametric model by gener...
Circular Joint1
In this grasshopper tutorial, we will learn how to convert a triangular mesh to a series of panels a...

Contour Table
In this Rhino Grasshopper tutorial for beginners, you’ll learn how to model a parametric table with...
Dendro Waffle
In this grasshopper example file, you can create a waffle structure by using the dendro plugin to ma...

Desktop Organizer
In this Grasshopper example file, you can design a laser cut Desktop Organizer parametrically. It al...

Display Stand
In this Grasshopper example file, you can design a display stand parametrically. It also generates n...
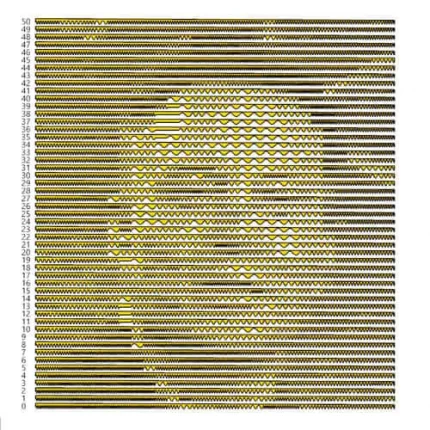
Image to Strips
In this Grasshopper Example File, You can transform a bitmap image in to wavy strips.

Laser Cut Stand
In this Grasshopper example file, you can design a parametric radial stand suitable for laser cuttin...
Lloyd’s Voronoi relaxation
Lloyd’s algorithm, also known as Voronoi relaxation, finds evenly spaced sets of points in subsets o...
Mesh Paper Cut
In this Grasshopper tutorial you’ll learn how to planarize the quad faces of a mesh, ensuring they’r...
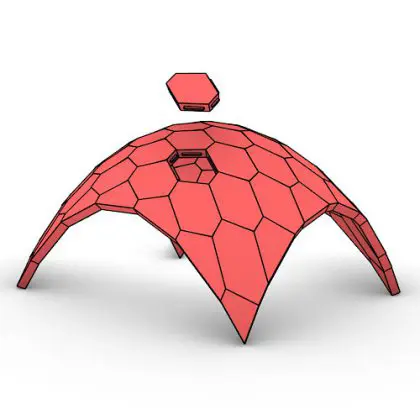
Ngon HexDivide
In this grasshopper ngon example file, you can design parametric hexagram bricks by using the HexDiv...

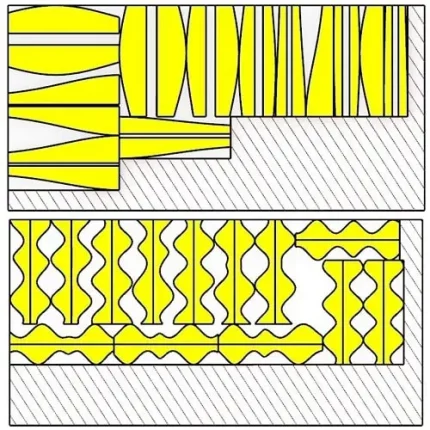
Optimize Nesting
in this grasshopper OpenNest example file, you can put every two peices of sections side to side to...

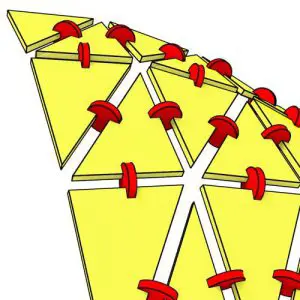
Paneling Fabrication
In this grasshopper example file you can convert a Nurbs surface to triangular panels and then use s...
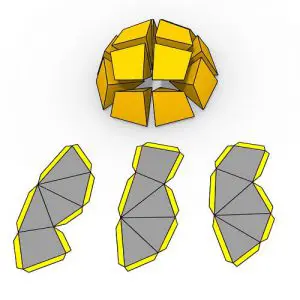
Parametric Cones
In this Grasshopper example file you can use the Kangaroo2 Plugin combined with the Open Nest plugin...

Parametric Drawer
In this Grasshopper example file, you can create a parametric laser-cut drawer by using the Fennec a...

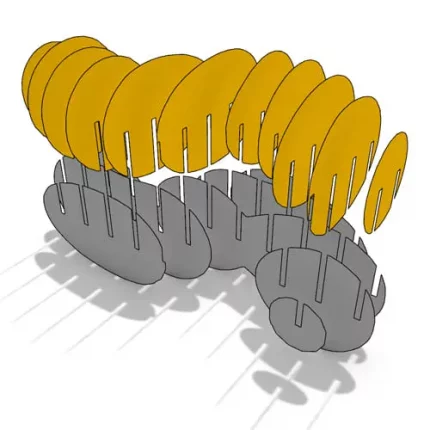
Parametric Stool
In this grasshopper example file , you can design a parametric Stool with a wavy design and extract...
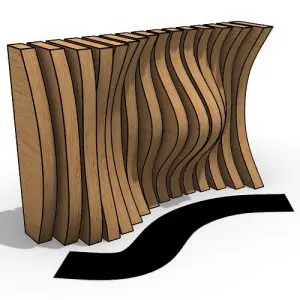
Parametric Wall
In this Grasshopper tutorial, you will learn how to model a parametric wall using a base surface or...

Pendant Lamp
In this Grasshopper example, you can model a parametric pendant lamp with radial ribs and prepare it...

Pendant Lamp
In this Grasshopper 3D example file, you can model a hexagonal pendant lamp and extract the sections...
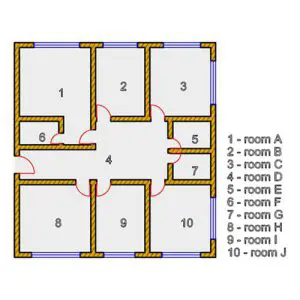
Plan Drafting
In this Grasshopper Script, You can add details to your plan by providing lines for the wall, doors,...
Polar Ribs
In this Grasshopper tutorial for beginners, you’ll learn how to create a polar array of rectangular...
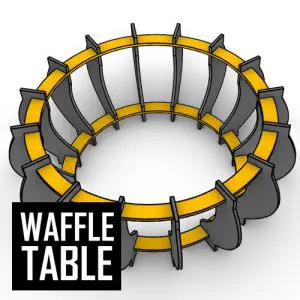
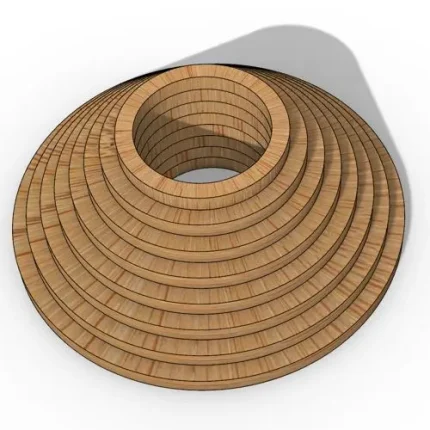
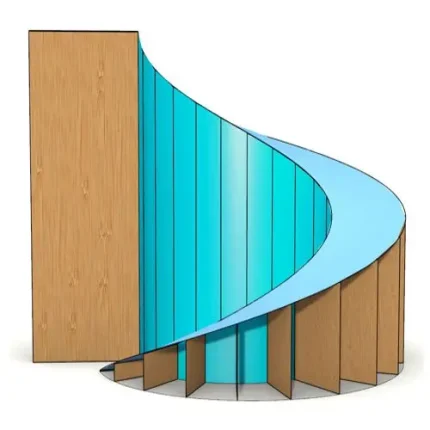
Radial Waffle Table
In this Grasshopper Example File, you can model a parametric radial table and then use the Open nest...
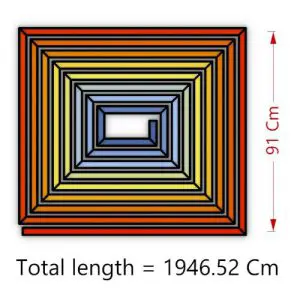
Rectangular Fractal Art
In this grasshopper3d tutorial you can learn how to generate a parametric rectangular fractal art by...

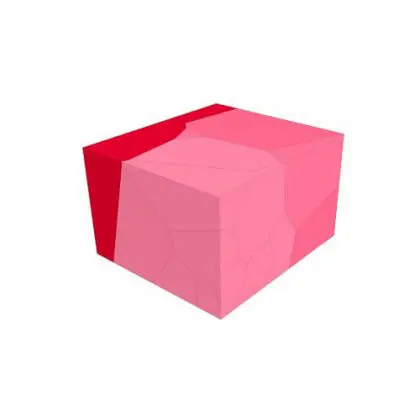
Round box
In this Grasshopper example file, you can design a round laser cut gift box parametrically. It also...

sliding gift box
In this Grasshopper example file, you can design a gift box with sliding cap parametrically. It also...

Stackable Bin
In this Grasshopper example file, you can design a stackable lasercut bin parametrically. It also ge...

stackable box
In this Grasshopper example, you can design a stackable lasercut box parametrically. It also generat...

Stair Step Display
In this Grasshopper example, you can design a stair-shaped display stand parametrically. It also gen...

Text on Mesh
In this Grasshopper Example File,You can generate any text on a mesh by using the fennec plugin.

Voronoi Panels
In this grasshopper example file you can model a series of random voronoi panels and extract the fin...






