
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
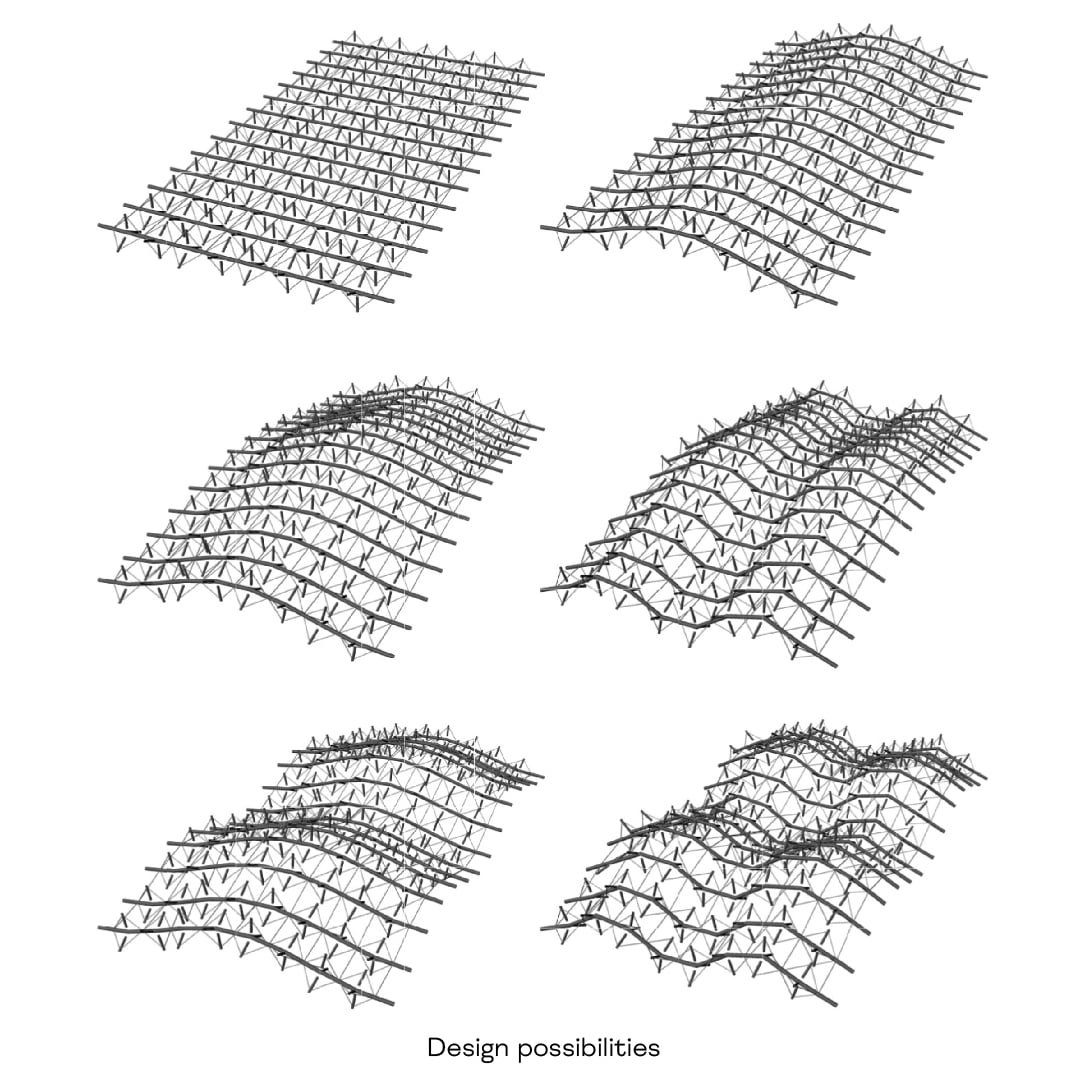
Kinetic Hybrid Structure Development And Simulation
Supported through technological advances, the concept of kinetic architecture is internationally increasingly acknowledged in the past years in the development of adaptable buildings as to differing functional requirements, or external loading conditions.
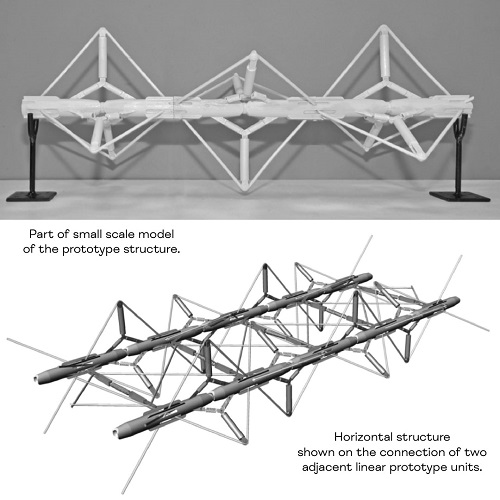
Most decisive factor is the structure in terms of materials and geometrical configurations, and the control system integrated within. Based on general principles of tensegrity structures, a hybrid system has been developed that consists of continuous hinge connected compression members, strengthened by an internal system of struts and continuous cable diagonals with closed loop.
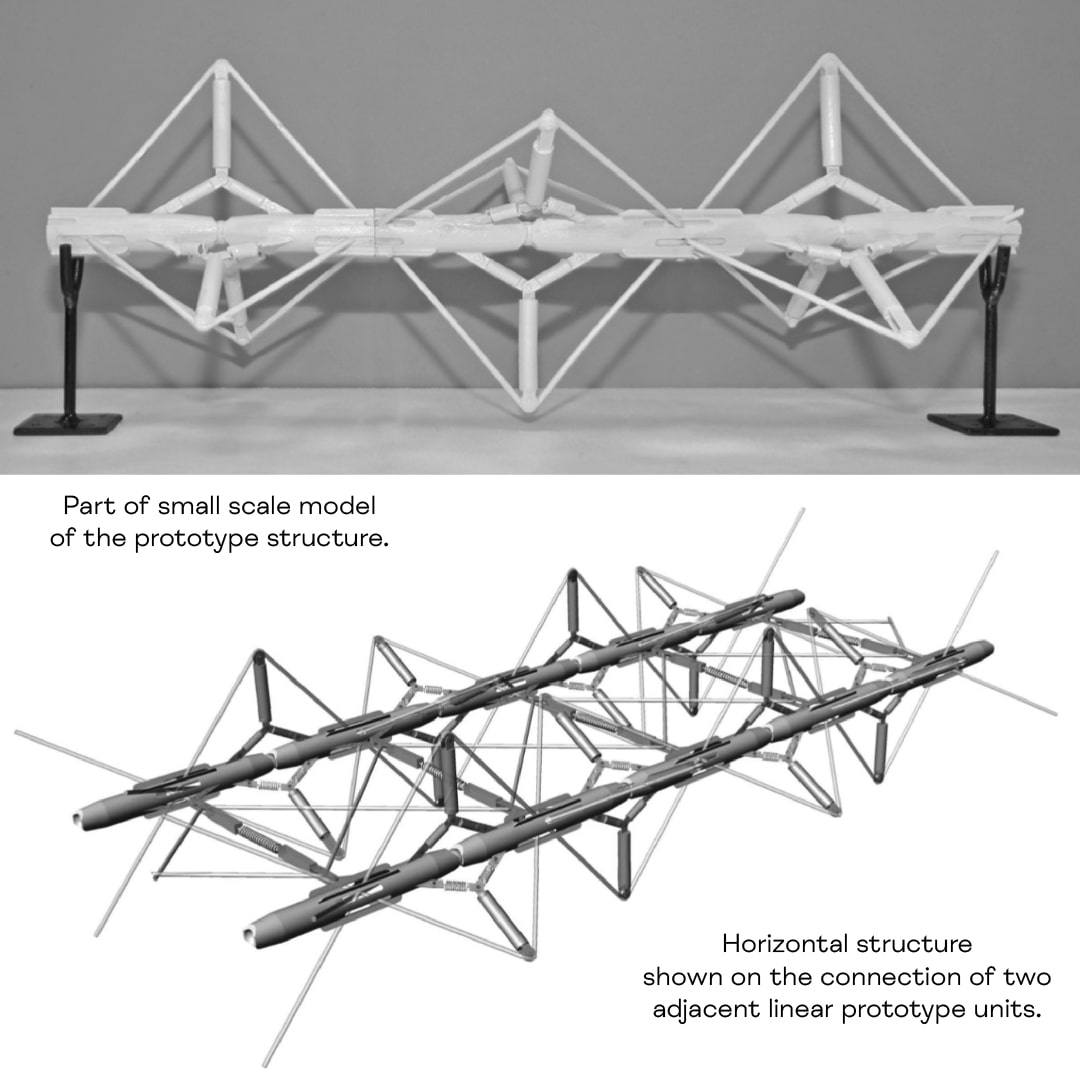 The kinetic mechanism is achieved through alteration of the cables length and the respective relative inclination of any adjacent compression members. In this way the transformability of the system arises primarily from the inherent integrative composition and dual capabilities of its members.
The kinetic mechanism is achieved through alteration of the cables length and the respective relative inclination of any adjacent compression members. In this way the transformability of the system arises primarily from the inherent integrative composition and dual capabilities of its members.
Following the construction design of the prototype structure, the interactive development, as regards geometric properties and structural configurations, is presented analytically, as based on a parametric associative design approach applied.
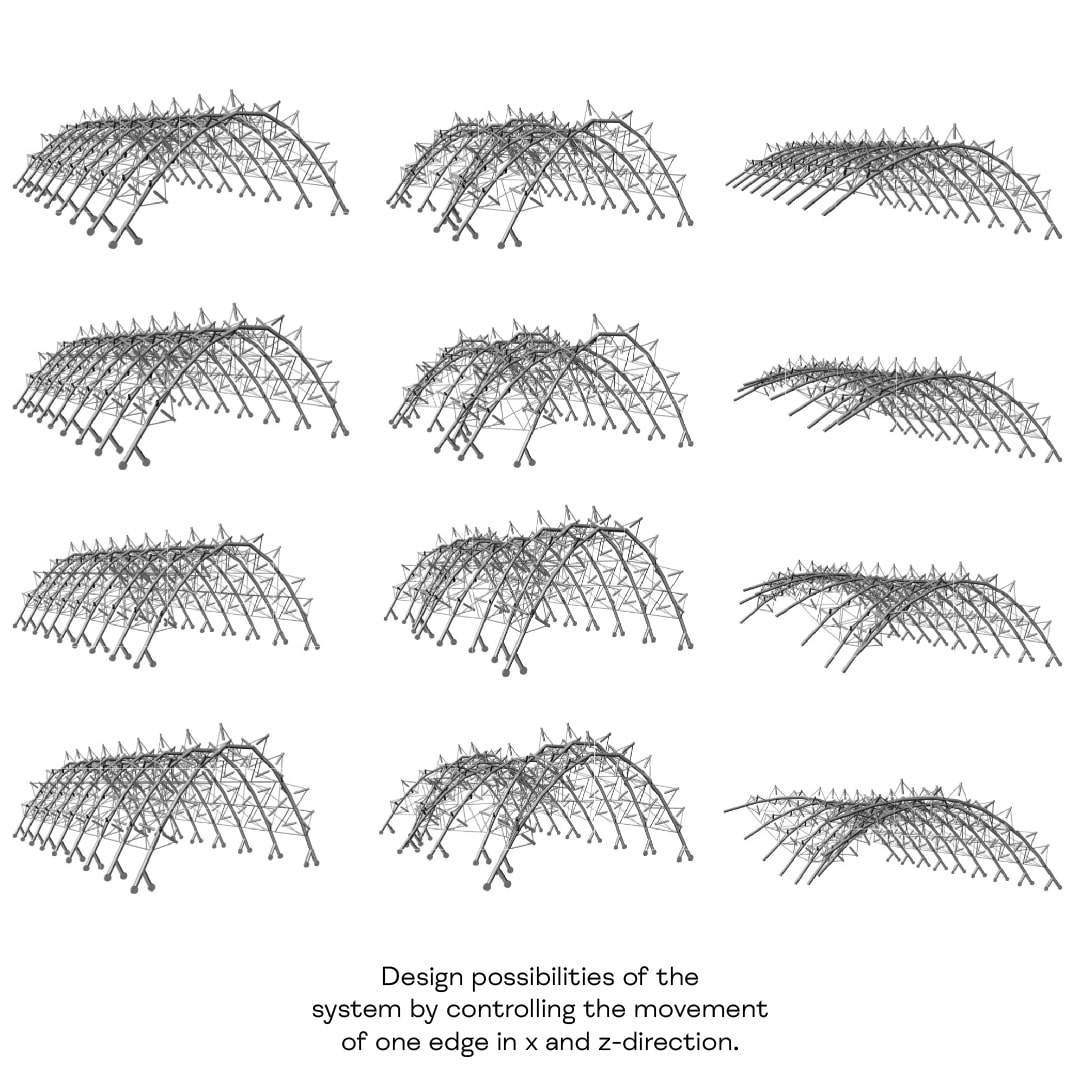 Along this line, the specific syntax of structural development and simulation through parametric design is suggested to support in real terms the control design of the innovative structure in an integrated interactive context.
Along this line, the specific syntax of structural development and simulation through parametric design is suggested to support in real terms the control design of the innovative structure in an integrated interactive context.
In the last decades the concept of kinetic architecture is increasingly acknowledged in its potentialities in terms of adaptability, expandability, optimization and sustainability of our built-up recourses.
Kinetic architecture aims at the development of timely adaptable systems as to differing functional requirements, or external loading conditions, leading to buildings and building components with variable mobility, location, or geometry.
 In all cases such a concept is directly related to the properties of the integrative parts of the building, at first place to the structure and the building skin.
In all cases such a concept is directly related to the properties of the integrative parts of the building, at first place to the structure and the building skin.
Especially significant in terms of the kinetic operability is the development of the structure in two aspects: The structural mechanism that enables different geometrical configurations of the light-weight components through among others, folding, sliding, expanding and transforming in size and shape, and the control system that directs the structure towards specified transformations, through pneumatic, chemical, magnetic, natural or mechanical processes.
 Kinetic systems offer the possibility of multi-usages through transformative adaptability of a single structure. In this aspect, Buckminster Fuller demonstrated through “Ephemeralization” reduction of material.
Kinetic systems offer the possibility of multi-usages through transformative adaptability of a single structure. In this aspect, Buckminster Fuller demonstrated through “Ephemeralization” reduction of material.
Robert Kronenburg illustrates the advantage of such systems in that, buildings that use fewer resources and adapt efficiently to complex site and programmatic requirements are particularly relevant to an industry, becoming increasingly aware of its environmental responsibilities.
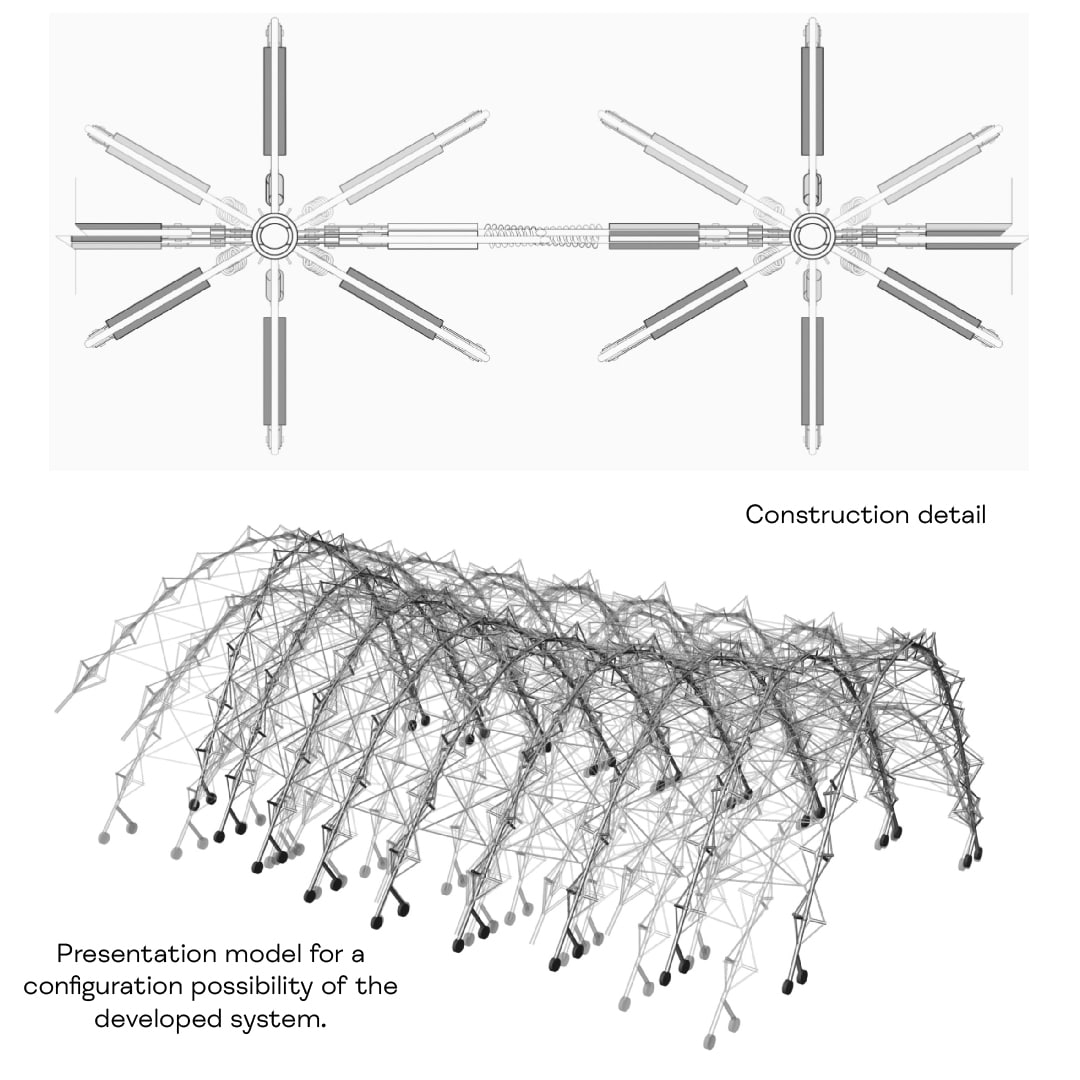
In the present paper the construction development of a kinetic hybrid structural prototype and its analysis as regards possible structural configurations, based on parametric-associative design logic are presented.
 The results of this research project support further development phases of the kinematic structural analysis and the control system design. Based on the prototype unit development, the structure is composed of continuous hinge connected compression members, stabilized through a strengthening system of continuous cables and struts.
The results of this research project support further development phases of the kinematic structural analysis and the control system design. Based on the prototype unit development, the structure is composed of continuous hinge connected compression members, stabilized through a strengthening system of continuous cables and struts.
The connection of the elements follows the principle of tensegrity structures in the 3-dimensional space. In the frame of development, the prototype system alternatives have been interactively investigated in their geometric properties and structural configurations through the parametric design procedure, described hereafter.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







