
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can


This paper by Tobias Schwinn, Oliver David Krieg, Achim Menges, Boyan Mihaylov and Steffen Reichert presents research into computational design processes that integrate not only criteria of physical producibility but also characteristics of design intelligence and performance.
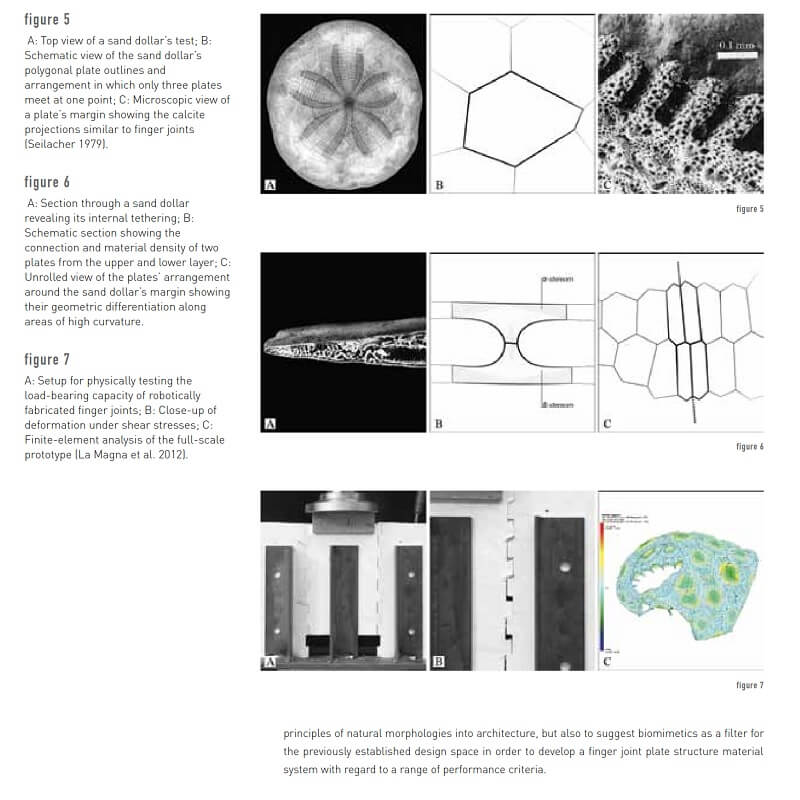
In the first part, the use of an industrial robot’s design space for developing differentiated finger joint connections for planar sheets of plywood is introduced. Subsequently, biomimetics is proposed as a filter for the possible geometric differentiations with respect to performative capacities.
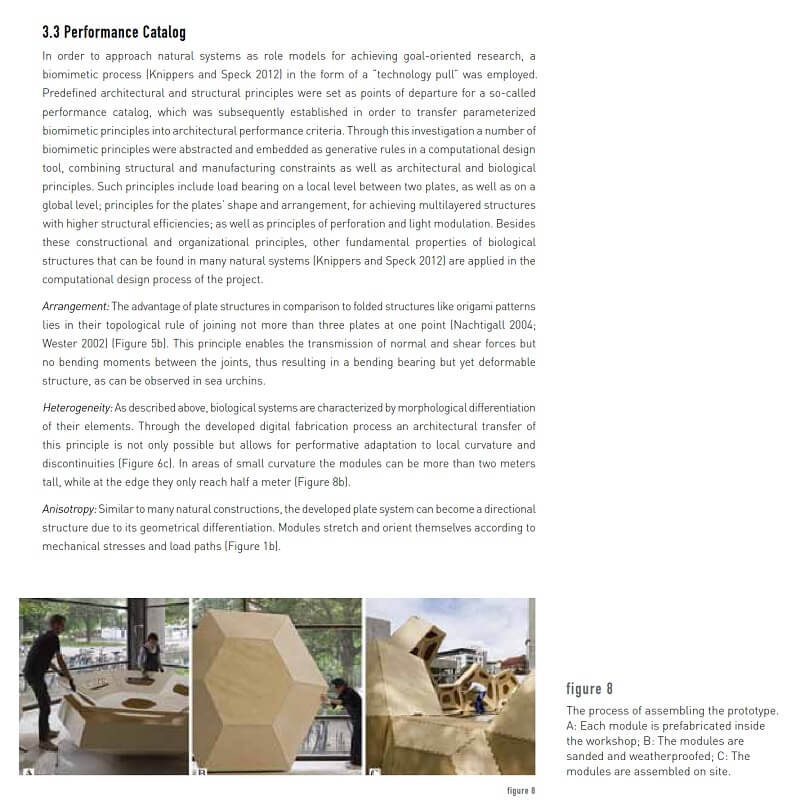
The second part focuses on the integration of fabricational and biomimetic principles with structural and architectural demands, as well as the development of a custom digital data structure for the fabrication of finger joint plate structures resulting in the construction of a full-scale prototype.

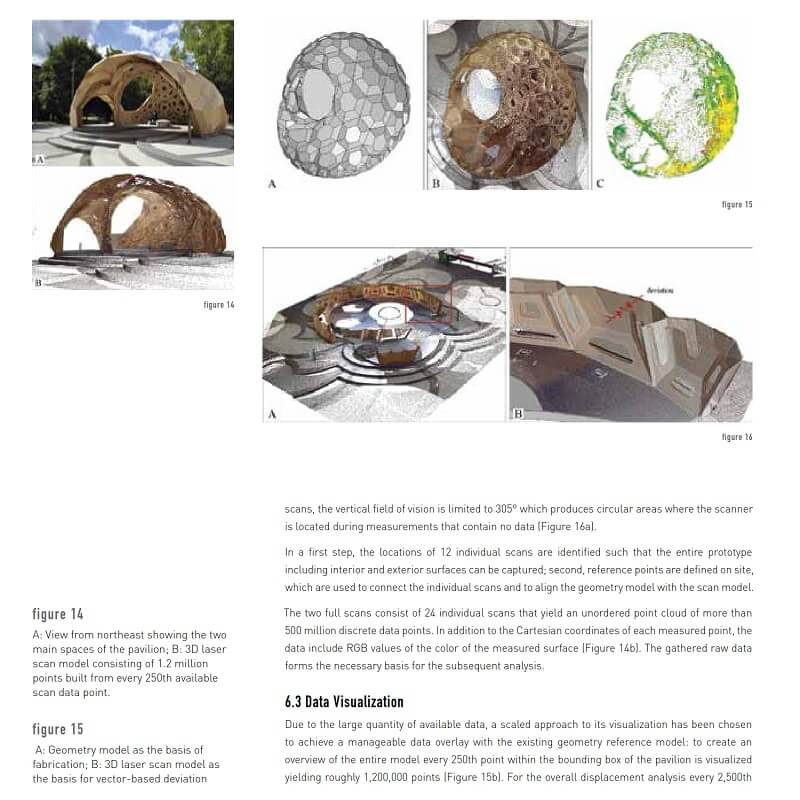
The paper concludes with an evaluation of the tolerances inherent in construction through 3D laser scan validation of the physical prototype.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







