
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
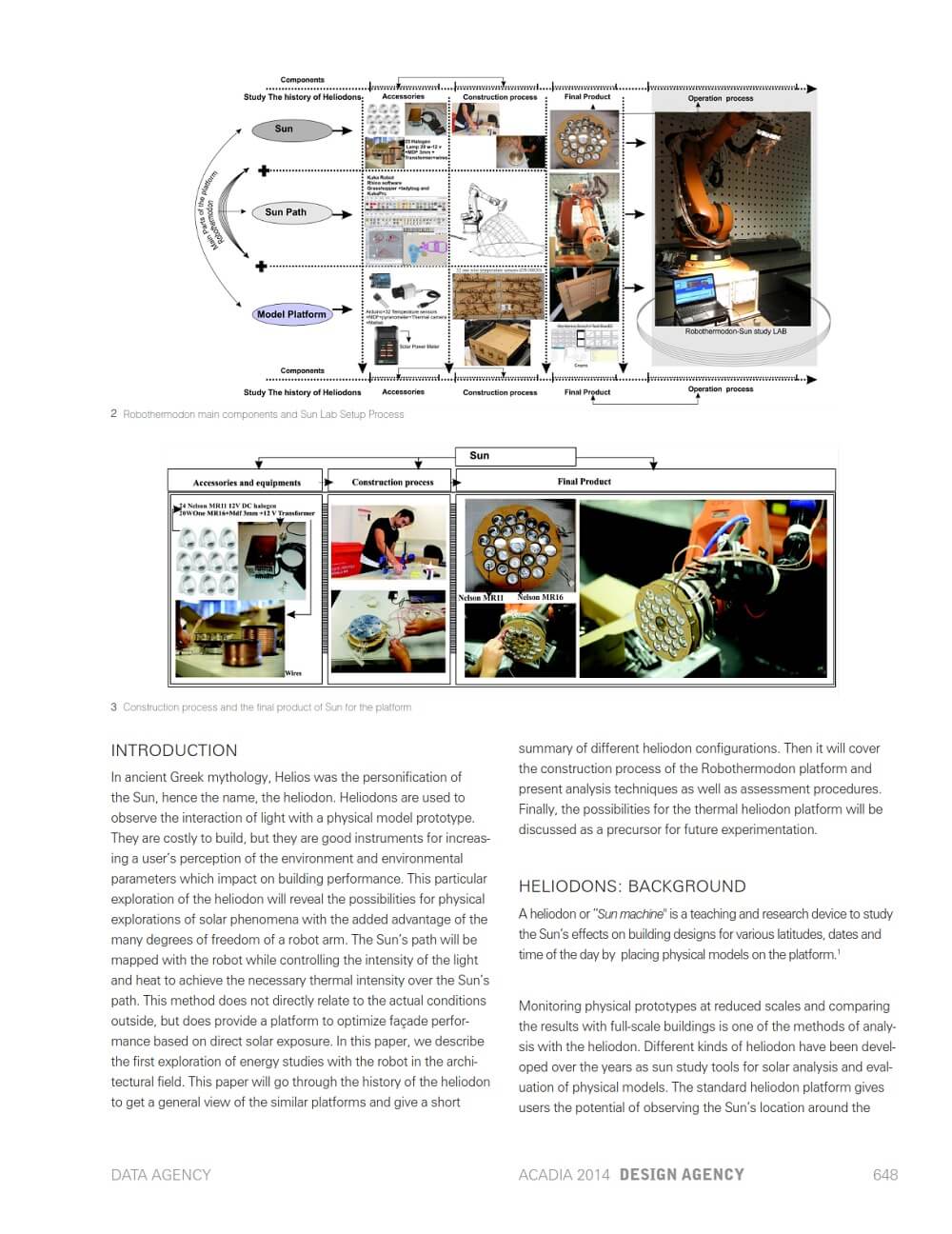
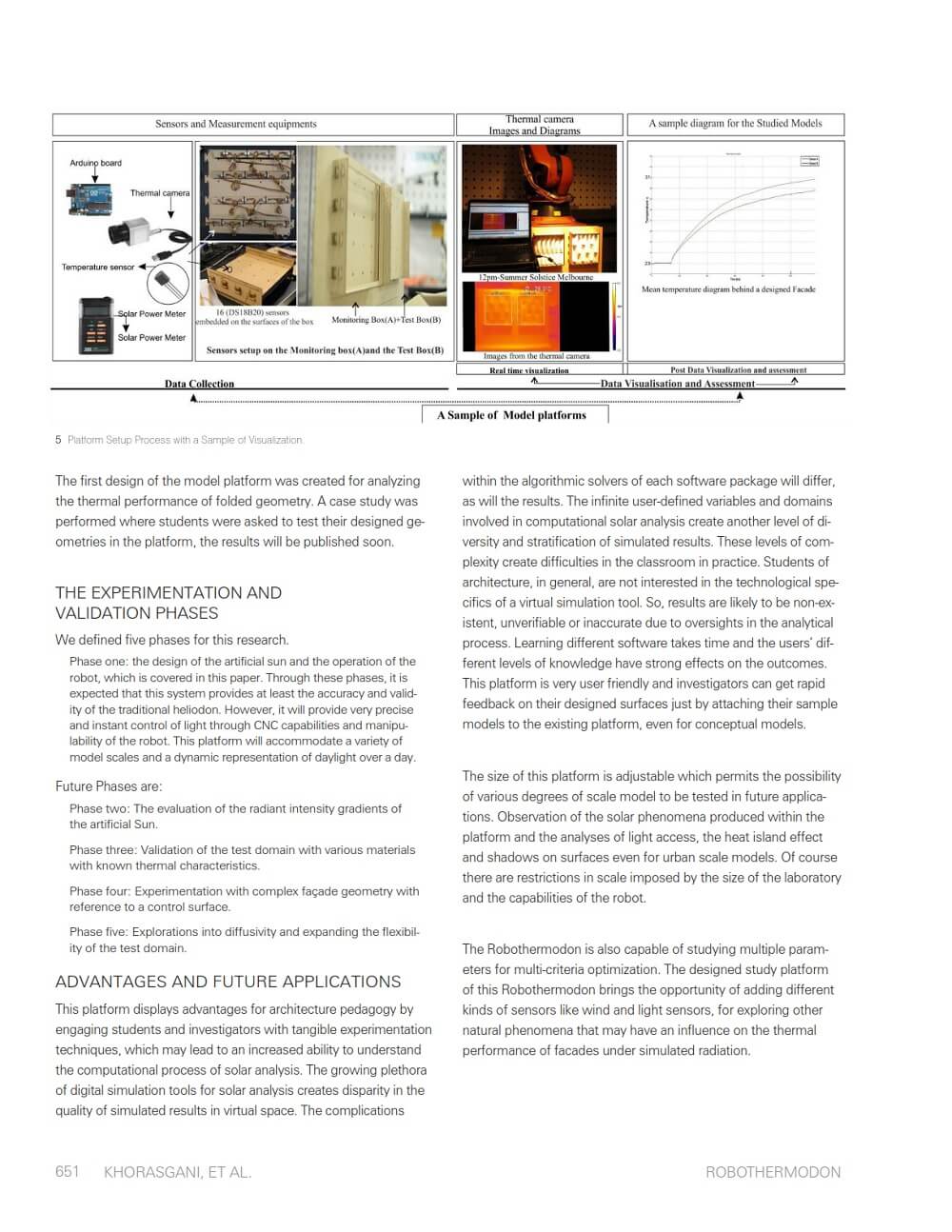
This research by Mehrnoush Latifi Khorasgani, Daniel Prohasky, Jane Burry, Akbar Akbarzadeh and Nicholas Williams focuses on the design of a Robotic solar analysis platform for critical studies which explore dynamic solar light and heat phenomena within the laboratory. This robotic platform gives designers the opportunity to receive rapid feedback from physical models in real time. The aim of this paper is to propose a solar evaluation platform within the physical domain to engage investigators with tangible experimentation techniques, which may lead to an increased ability to understand the computational process.
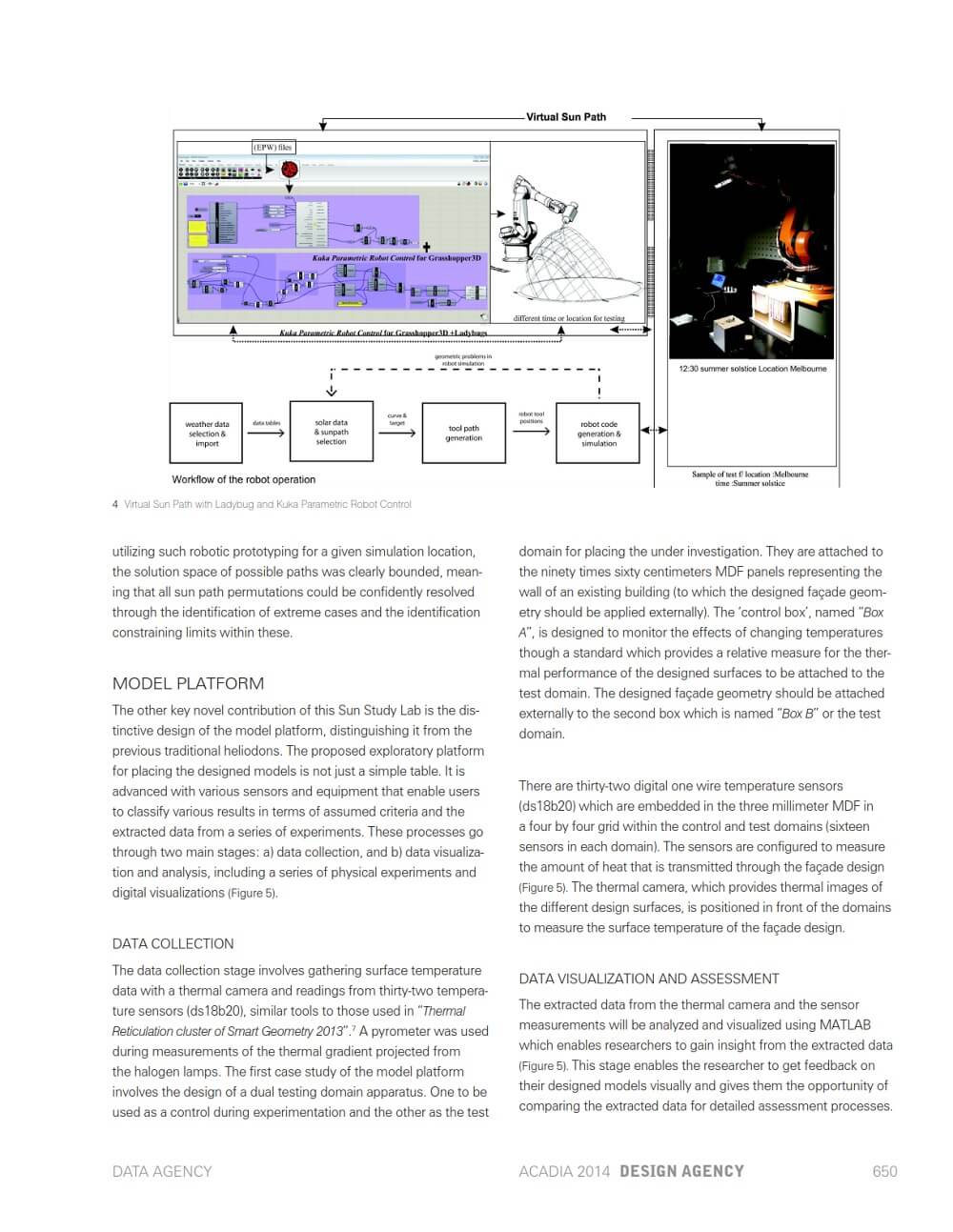
The aim of this thermal heliodon is to create a method of solar analysis with the aid of the robot and using its inherent capabilities and CNC flexibilities to engage students and researchers with this mixed physical or digital simulation platform. A novel design of a robot-controlled heliodon to simulate the motion of the Sun is described. It is a simple and relatively low cost accessory, fitted to the robot arm and can easily change the construction laboratory into a sun study lab. This platform gives researchers and students who have access to the robot, the ability to integrate the physical nature of light and heat within the early stage of their design process.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







