
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

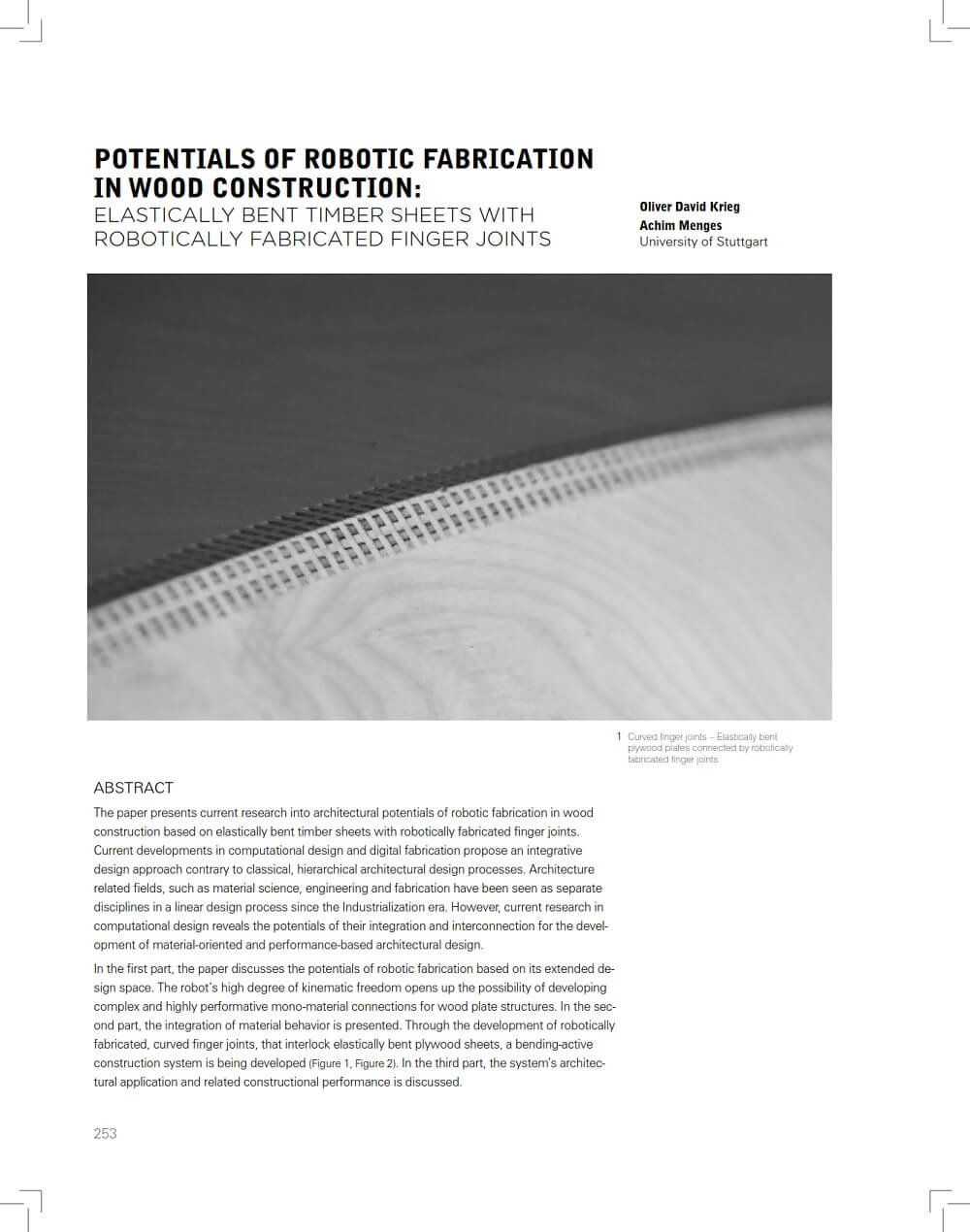
This paper by Oliver David Krieg and Achim Menges presents current research into architectural potentials of robotic fabrication in wood construction based on elastically bent timber sheets with robotically fabricated finger joints. Current developments in computational design and digital fabrication propose an integrative design approach contrary to classical, hierarchical architectural design processes. Architecture related fields, such as material science, engineering and fabrication have been seen as separate disciplines in a linear design process since the Industrialization era. However, current research in computational design reveals the potentials of their integration and interconnection for the development of material-oriented and performance-based architectural design.
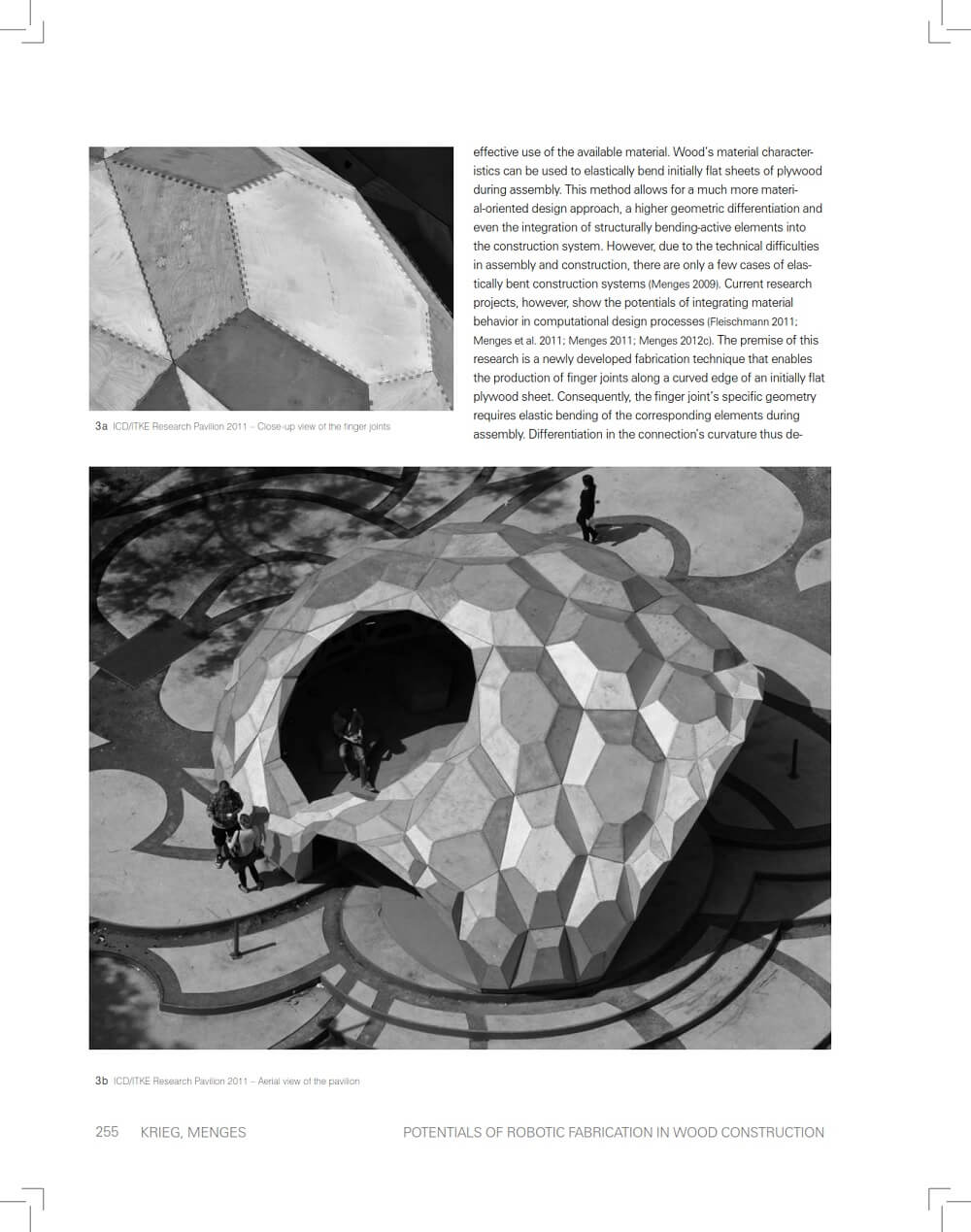
In the first part, the paper discusses the potentials of robotic fabrication based on its extended design space. The robot’s high degree of kinematic freedom opens up the possibility of developing complex and highly performative mono-material connections for wood plate structures. In the second part, the integration of material behavior is presented. Through the development of robotically fabricated, curved finger joints, that interlock elastically bent plywood sheets, a bending-active construction system is being developed. In the third part, the system’s architectural application and related constructional performance is discussed.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







