
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

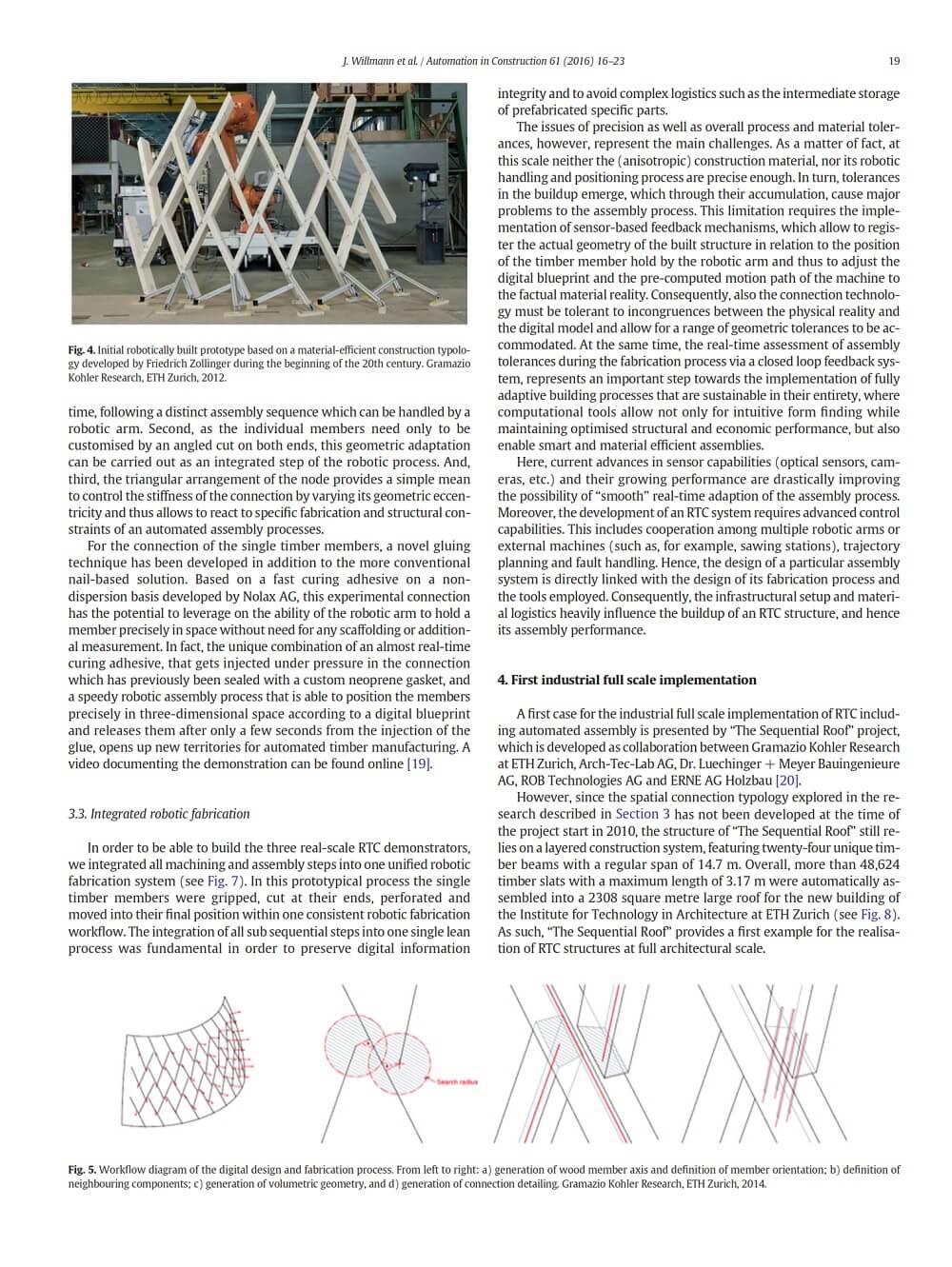
This paper by the group of Gramazio Kohler Research at ETH Zurich, presents a novel approach to non-standard timber assembly – Robotic Timber Construction (RTC) – where robotic fabrication is used to expand additive digital fabrication techniques towards industrial full scale dimensions. Featuring robotic systems that grasp, manipulate, and finally position building components according to a precise digital blueprint, RTC combines robotic assembly procedures and advanced digital design of non- standard timber structures. The resulting architectural morphologies allow for a convergence of aesthetic and functional concerns, enabling structural optimisation through the locally differentiated aggregation of material. This approach offers a new perspective on automated timber construction, where the focus is shifted from the processing of single parts towards the assembly of generic members in space.

As such, RTC promotes unique advantages over conventional approaches to timber construction, such as, for example, CNC joinery and cutting: through the automated placement of material exactly where it is needed, RTC combines additive and largely waste-free construction with economic assembly procedures, it does not require additional external building reference, and it offers digital control across the entire building process, even when the design and assembly information are highly complex. This paper considers 1) re- search parameters for the individual components of RTC (such as computational design processes, construction methods and fabrication strategies), and 2) the architectural implications of integrating these components into a systemic, unifying process at the earliest stages of design. Overall, RTC leads to profound changes in the design, performance and expressive language of architecture and thus fosters the creation of architecture that profoundly reinvents its constructive repertoire.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







