
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

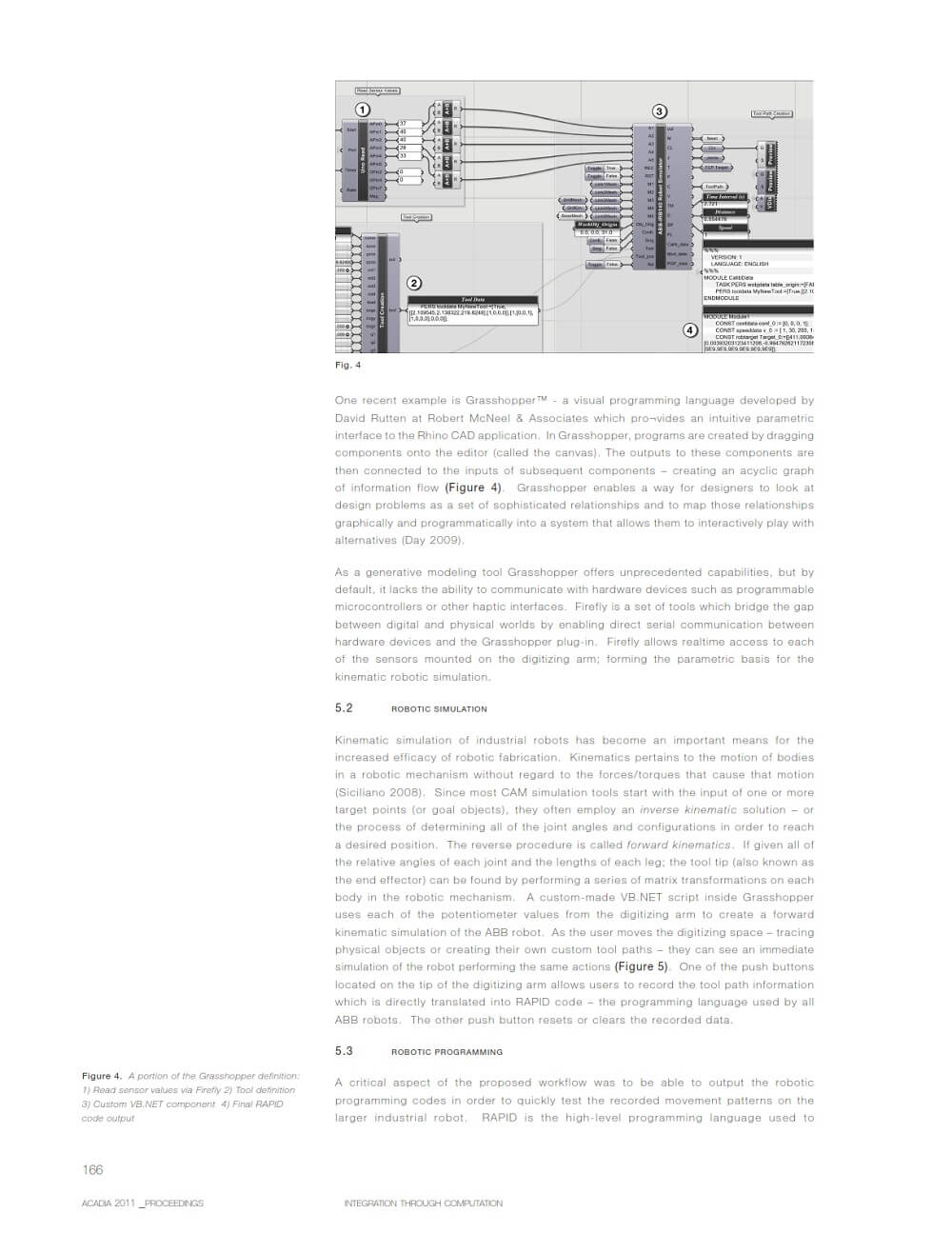
This paper by Andrew Payne proposes the use of a new set of software tools, called Firefly, paired with a low-cost five-axis robotic motion controller. This serves as a new means for customized tool path creation, realtime evaluation of parametric designs using forward kinematic robotic simulations, and direct output of the programming language (RAPID code) used to control ABB industrial robots. Firefly bridges the gap between Grasshopper, a visual programming editor that runs within the Rhinoceros 3D CAD application, and physical programmable microcontrollers like the Arduino; enabling realtime data flow between the digital and physical worlds.
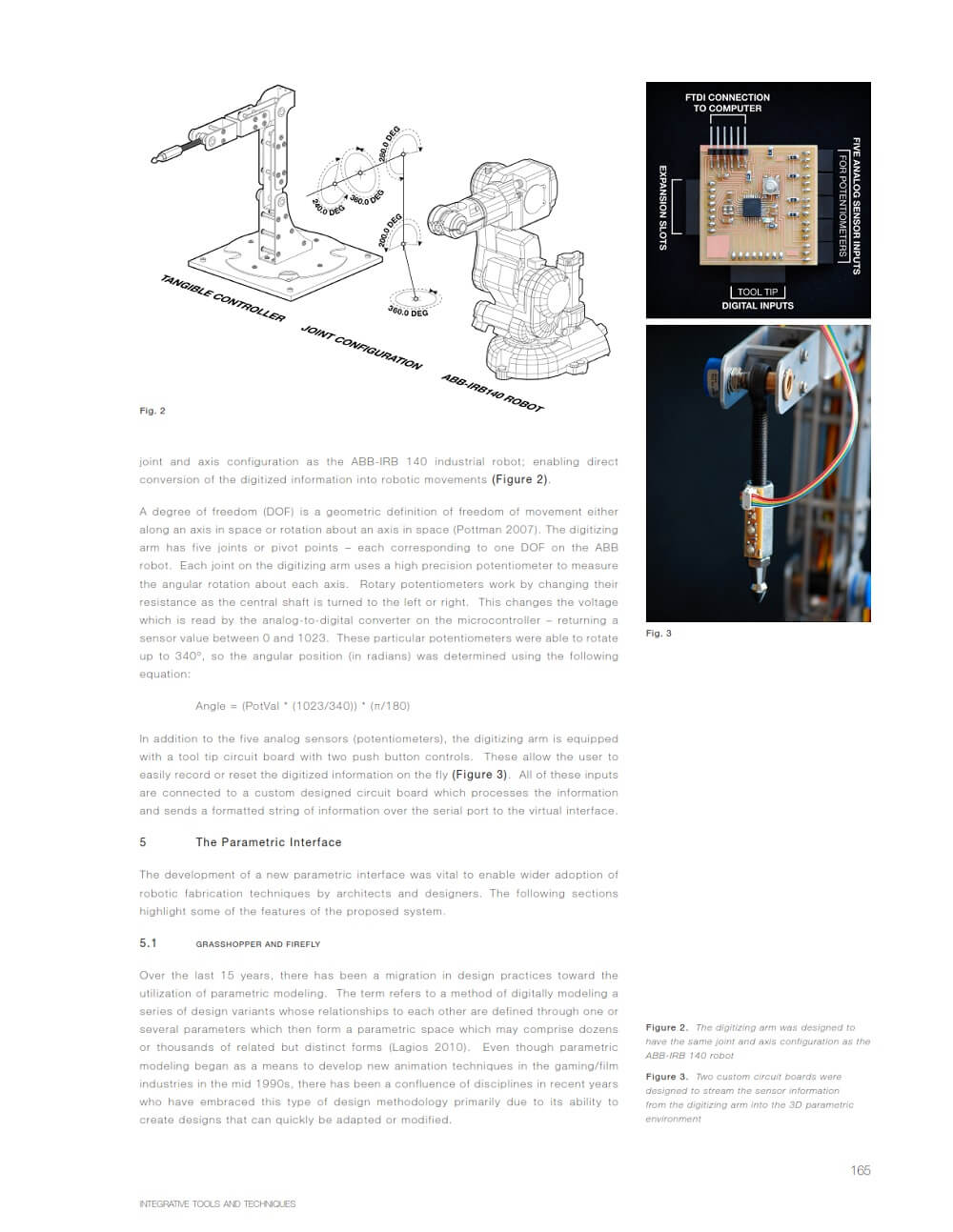
The custom-made robotic motion controller is a portable digitizing arm designed to have the same joint and axis configuration as the ABB-IRB 140 industrial robot, enabling direct conversion of the digitized information into robotic movements. Using this tangible controller and the underlying parametric interface, this paper presents an improved workflow which directly addresses the shortfalls of multifunctional robots and enables wider adoption of the tools by architects and designers.

String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







