
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
Sensors and Workflow Evolutions: Developing A
Framework for Instant Robotic Toolpath Revision
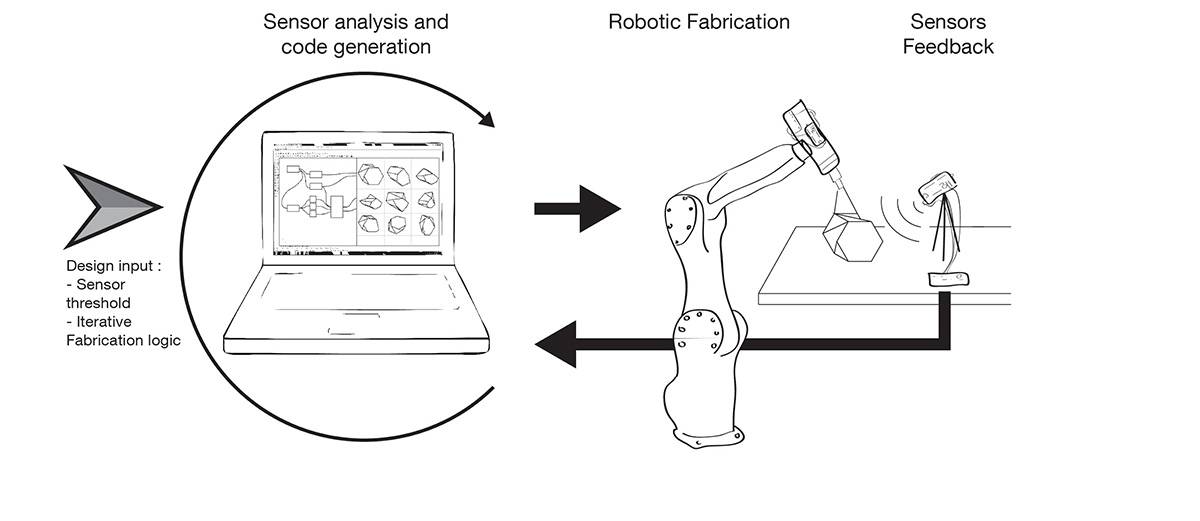
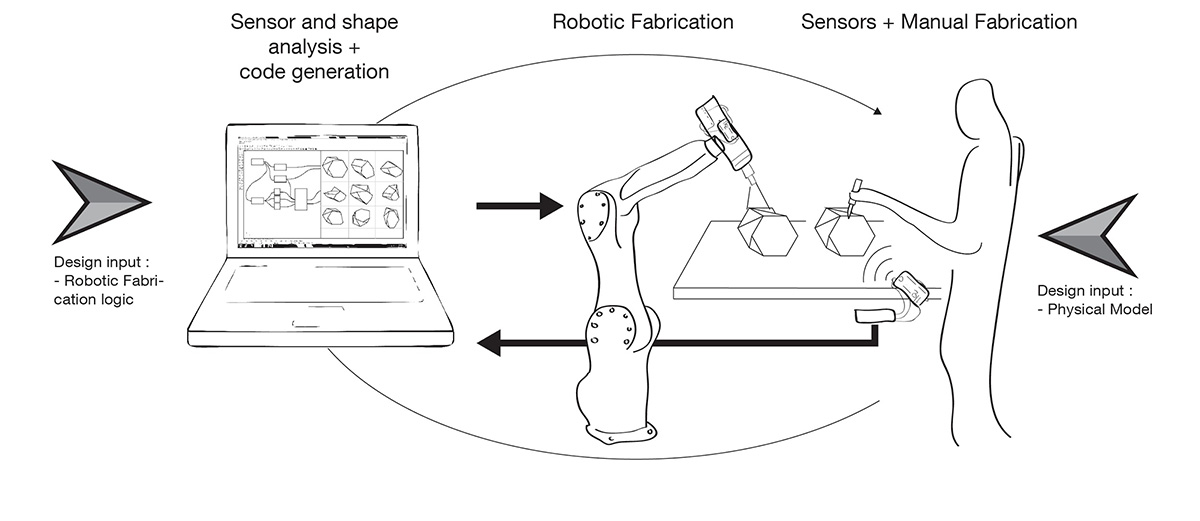
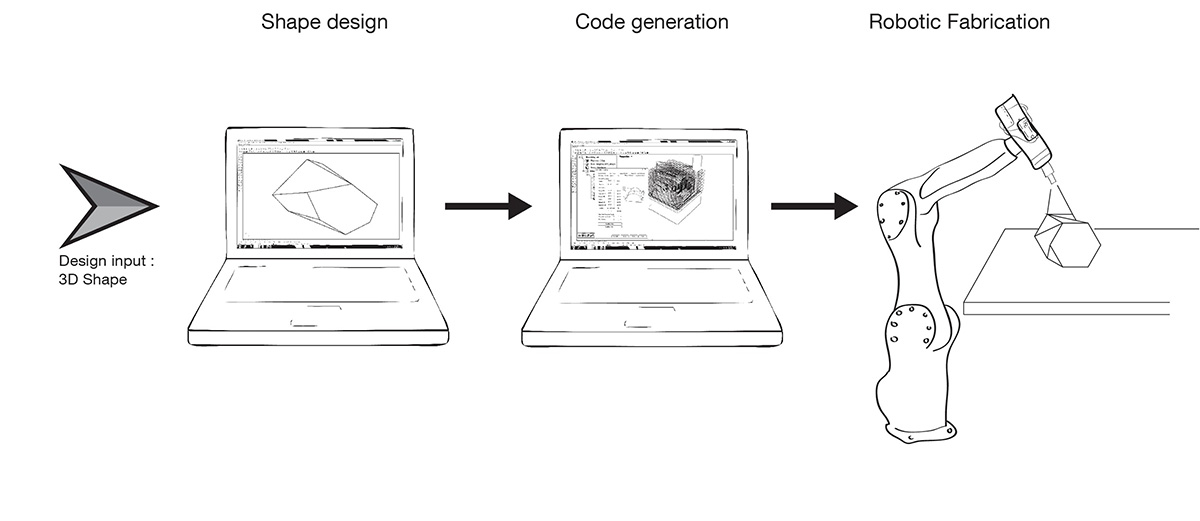 Fig. 1. Common CAD + CAM workflow
Fig. 1. Common CAD + CAM workflowThis paper examines the potential for creative practitioners to adopt robotic fabrication processes augmented with the introduction of sensors. Typically, the outcomes of a fabrication process are predetermined, however, with the introduction of sensors, design and fabrication process may be interrupted by real-time feedback. In such a system, design roles and authorship become secondary to the process of manipulating data, such that new rules of design can be introduced and developed in response to materials.
Hardware and software such as Arduino, Grasshopper3D, Rhinoceros3D and Processing have opened up new strategies of hacking, coding and robotic manipulation that can be embedded in robotic fabrication processes. The addition of sensors provides feedback about material location and characteristics, work environment and co-workers, so as to support architectural dialogue. This paper proposes a framework for designing new protocols for human interaction and machine response in robotic fabrication systems.
Progress in robotic fabrication and manufacturing has accelerated in recent years through research in industry, practice, construction and manufacturing (Gramazio and Kohler, 2014). Robotic fabrication labs are now embedded in professional practices, educational institutions and research centers across architecture, art and design.
While robotic fabrication has extended previous automation processes of the automotive industry towards complex and singular fabrication solutions, the challenge is now to expand the negotiation of robotic processes—to influence toolpath options and define new material processes—in short to introduce a form of design thinking (Moggridge, 2007) for robotics with the goal of enhancing creativity and the evolution of design processes, models, and techniques.
Robotic fabrication processes enable designers and architects to explore the boundaries between digital and material worlds. Beyond optimization criteria or parametric design, new design strategies such as generative design and collaborative design are enabling new ways of approaching material exploration through robotics.
Open source software and hardware enable new forms of design, yet these new tools also demand design frameworks dealing with robots, data, sensor technologies and material contingencies.
Public interest in digital fabrication and the rising availability of 3D printers has allowed an increasing number of non-specialists to understand and adapt the logic and mechanisms behind the materialization process. It is now becoming common for users to change parameters of a digital fabrication process, e.g., feed-rates and the nozzle temperatures, to adapt it to their specific requirements.
In addition, the spread of open source hardware and software has empowered hobbyists, artists and designers to build their own machines, permitting the rise to new types of machines and fabrication processes. In architecture, industrial robots have proven to be robust and flexible research platform, allowing the precise placement of many types of tool within a large working envelope, allowing the designer to focus on the design of novel end-effector and processes.
The division between design and fabrication process is slowly disappearing in favor of a continuous form of design, which includes fabrication as an essential element. While providing a great framework for fast iteration and exploration, linear approaches reach their limit when fabrication becomes more complicated, requiring lengthy iterations.
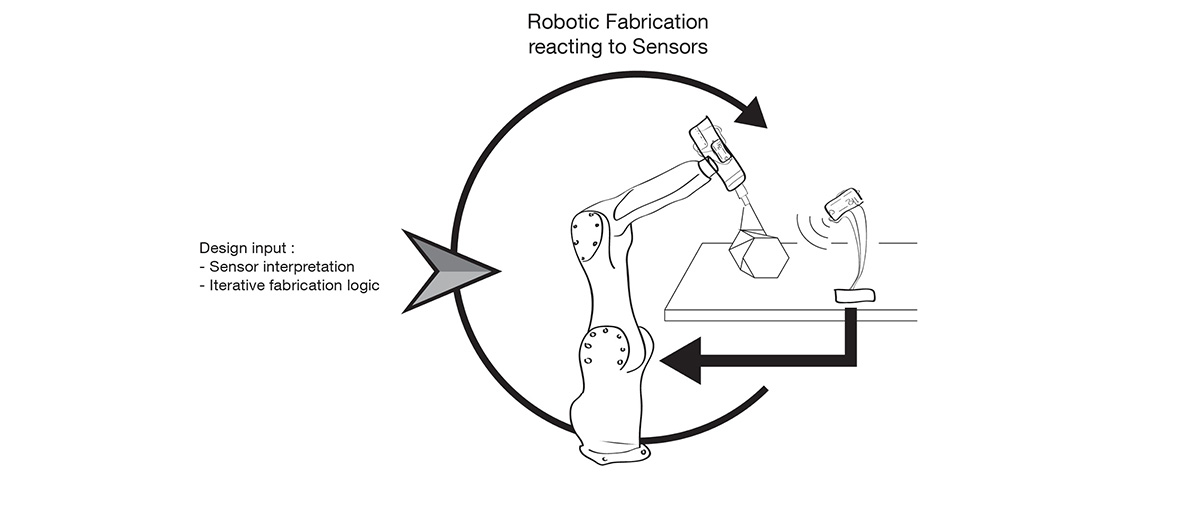
In addition, complex fabrication processes that use non-static materials, e.g., clay or polymer, require more precise and sensor feedback to enable tracking, fine-tuning and synchronization between material, machine and design. Sensors thus enable real-time feedback loops that have the potential to radically change the design process.
The act of giving a machine freedom to assist the creative process leads to unexpected and useful information both from the machine and material perspective. By coupling Human-Machine Interface with robotic fabrication, sensor feedback and digital computation, new possibilities for creative collaboration are appearing. Collaboration between robots and human can enhance creativity and innovation by supporting designer and researcher while exploring complex material system.
Such material exploration through robotic fabrication can gain precision and in depth information from sensor analysis of the material, the context and the user’s movements. The advantages associated with an open-source framework and low cost sensors may permit widespread adoption of this approach and enhance new collaboration between researchers and designers.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







