
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
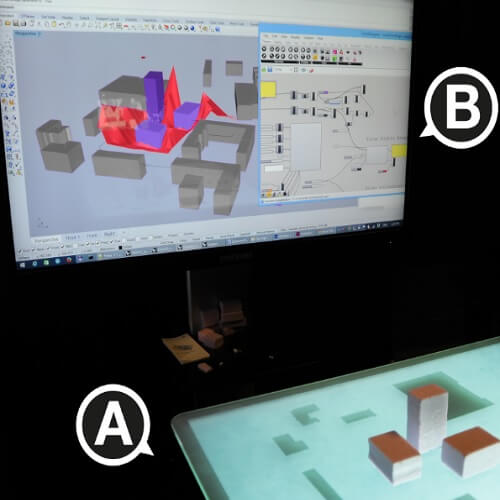
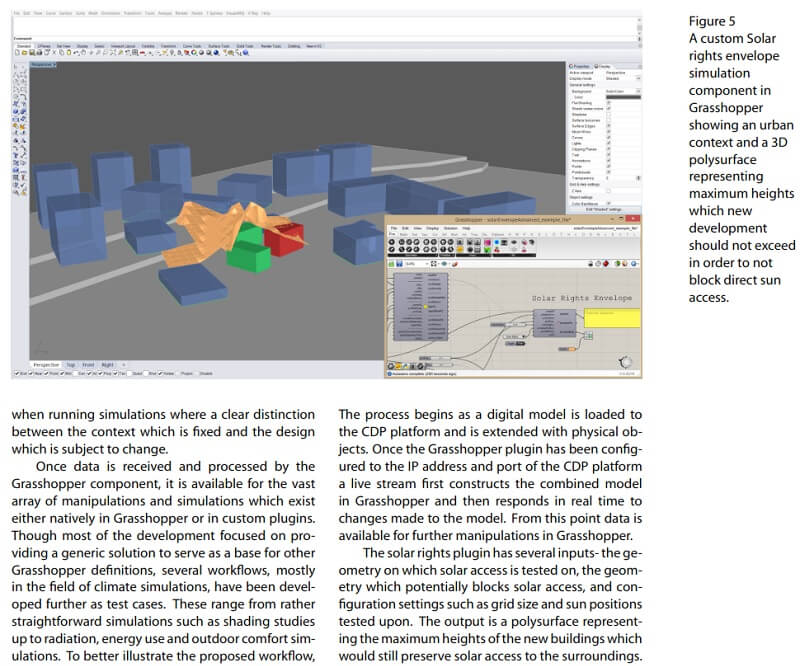
The use of digital tools in the early, creative design process is the focus of an interdisciplinary teaching and research project. Starting from the question of how a seamless connection between physical and digital tools could be made possible, the proposed method tries to bridge the gap between both methodologies and provide intuitive, visual and collaborative design coupled with advanced, real time computer simulations.
As a result, in this paper by Boris Plotnikov, Gerhard Schubert and Frank Petzold, A design platform has been developed which supports a seamless connection between freely shaped physical models, GIS data and Grasshopper3D.
The environment combines the reconstructed physical models with the digital one (surrounding buildings) and passes the information to a custom Grasshopper3D plug-in which serves as a link to existing and custom developed simulative tools. All simulations are performed and visualized in real time to support the intuitive and iterative design process.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







