String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

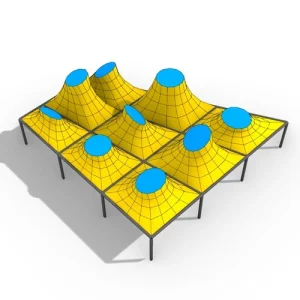
Optimization and prefabrication of timber Voronoi shells

We introduce a variant of the timber grid shell, the timber Voronoi shell, whose surface is reticulated by Voronoi tessellation and whose edges are made of discrete dimensional timber. This work explores form-finding methods of the Voronoi shell as a compressive funicular shell.
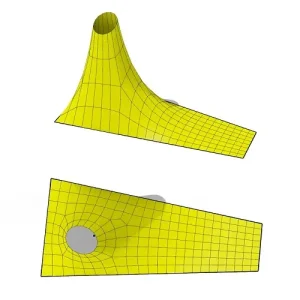
Two closed-form solutions to shape initialization are proposed. We develop methods for minimizing the deviation from coplanarity between timber members and adjacent surface normal in order to facilitate manufacturing.

A well-defined fabrication process is important for making the physical structure consistent with the structural model. A 6-axis robot with a motor spindle is employed to prefabricate the timber so the in situ manual assembly becomes easier.

A parametric model describes the joint details. We formulate the robotic toolpath as a closed-form function of the resultant mesh from form finding.
Thus, a general-purpose programming language can directly implement the mesh optimization and manufacturing processes without CAD or CAM software. The physical implementations, including an exhibition pavilion, validated the approach.

The shell structure is a thin curved plate structure that transmits applied forces by normal forces and shear forces developed on the surface. The thickness of the shell is often much smaller than other dimensions of the entire structure.
Thus, thin shells are efficient structural systems covering large spaces with a relatively small amount of materials. Much research has contributed to the theory of shell structures and the practical techniques of construction.

Recently, the rapid integration of digital fabrication technologies and computational design approaches has led to a new peak on this topic. Following this line, this work focuses on the form finding of shell structures and on the digital prefabrication of the components.
The rationalization of the manufacturing process contributes to a true, precise implementation of the virtual geometry. Our approach drives a fabrication-oriented design in the early stages, especially concerning the joint details.

Fabrication-oriented geometry design has gained great interest from both the academy and practice. Based on the advanced computational methods and fabrication technology, people now try to unlock the relation between form, structure and material, which follow an established set of preconceived rules (Menges 2016; Willmann et al. 2018).
For example, one will probably avoid connecting three pieces of timber at one point (because it seems tedious to describe and materialize the geometry) and prefer triangles to polygons in a timber-framed shell (because triangles are stable).
However, our method makes the timber Voronoi shell feasible by minimizing undesirable forces and defining the fabrication process with closed-form expressions. The interplay between formal logic and materialization processes could be an active and fruitful participant in shell design.

Recent years have seen two trends in shell structures design. On the one hand, user-friendly software (or plug-ins) make shell design accessible to non-experts. For example, Kangaroo and the RhinoVAULT plug-in for Rhinoceros are easy-to-use form-finding tools for architects.
People can also find convenient software that translates given geometry into robot toolpath. On the other hand, the cutting-edge development of shell design (e.g., the Armadillo vault Block et al. 2018) demands deep expertise on structural analysis, spatial design, material science, and CNC fabrication.
Without intensive cooperation between different disciplines, very little progress can be made. In this work, we propose a well-defined link from the form finding to the toolpath for fabrication and attempt to establish an explicit, consistent formalism from form finding to CNC manufacturing.
As a result, researchers from different fields can work together and new user-friendly software may link experts and new users.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.