
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
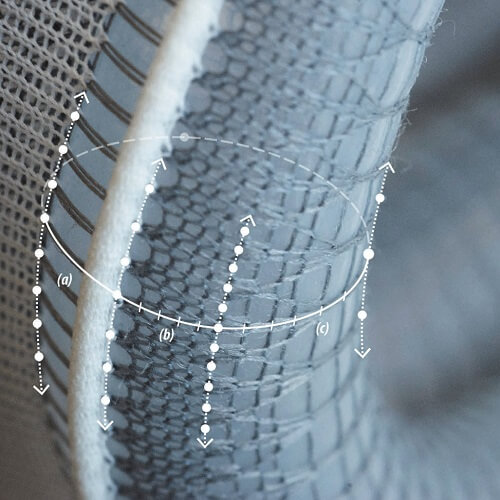
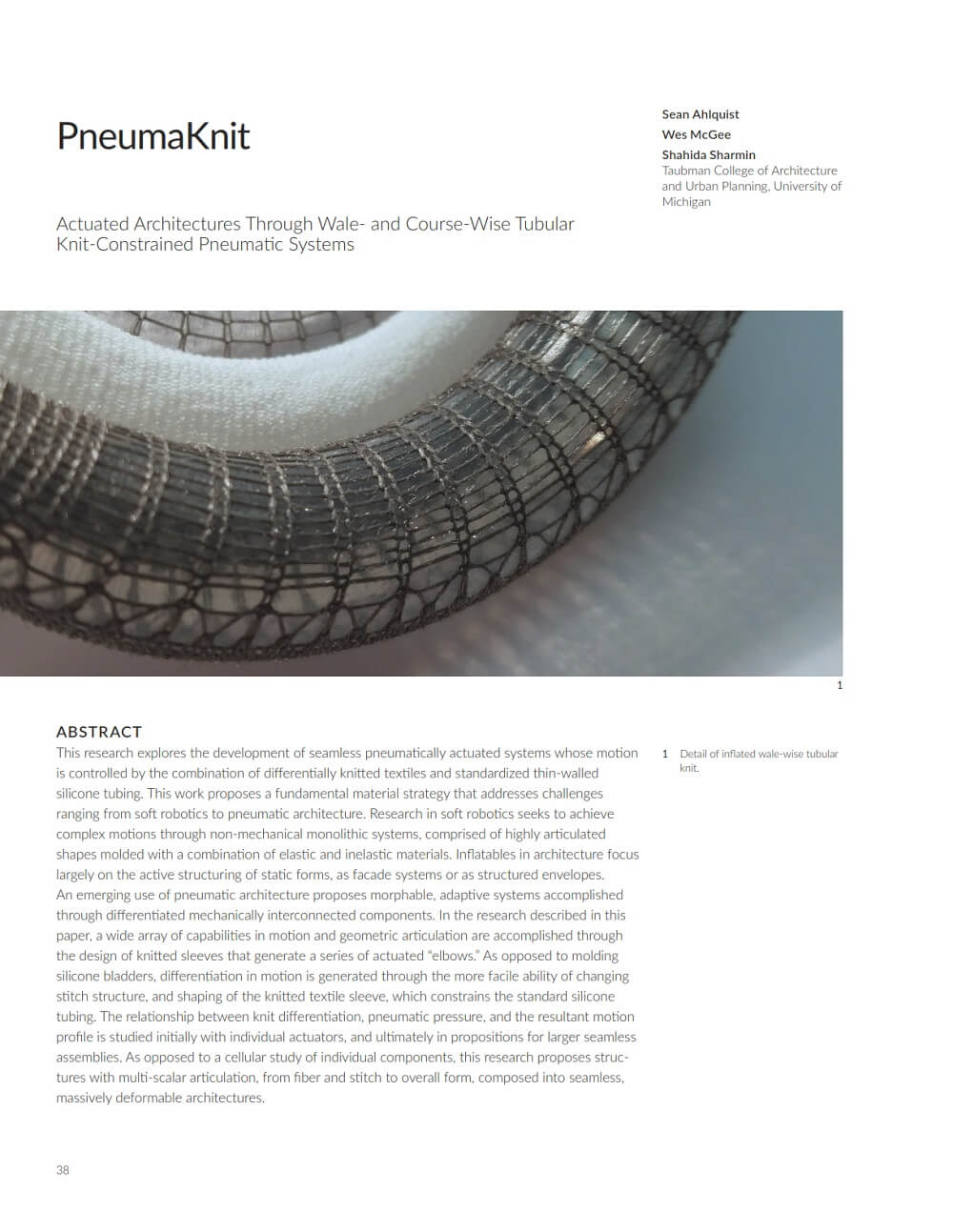
This research by Sean Ahlquist, Wes McGee and Shahida Sharmin explores the development of seamless pneumatically actuated systems whose motion is controlled by the combination of differentially knitted textiles and standardized thin-walled silicone tubing. This work proposes a fundamental material strategy that addresses challenges ranging from soft robotics to pneumatic architecture. Research in soft robotics seeks to achieve complex motions through non-mechanical monolithic systems, comprised of highly articulated shapes molded with a combination of elastic and inelastic materials.

Inflatables in architecture focus largely on the active structuring of static forms, as facade systems or as structured envelopes. An emerging use of pneumatic architecture proposes morphable, adaptive systems accomplished through differentiated mechanically interconnected components. In the research described in this paper, a wide array of capabilities in motion and geometric articulation are accomplished through the design of knitted sleeves that generate a series of actuated “elbows.”
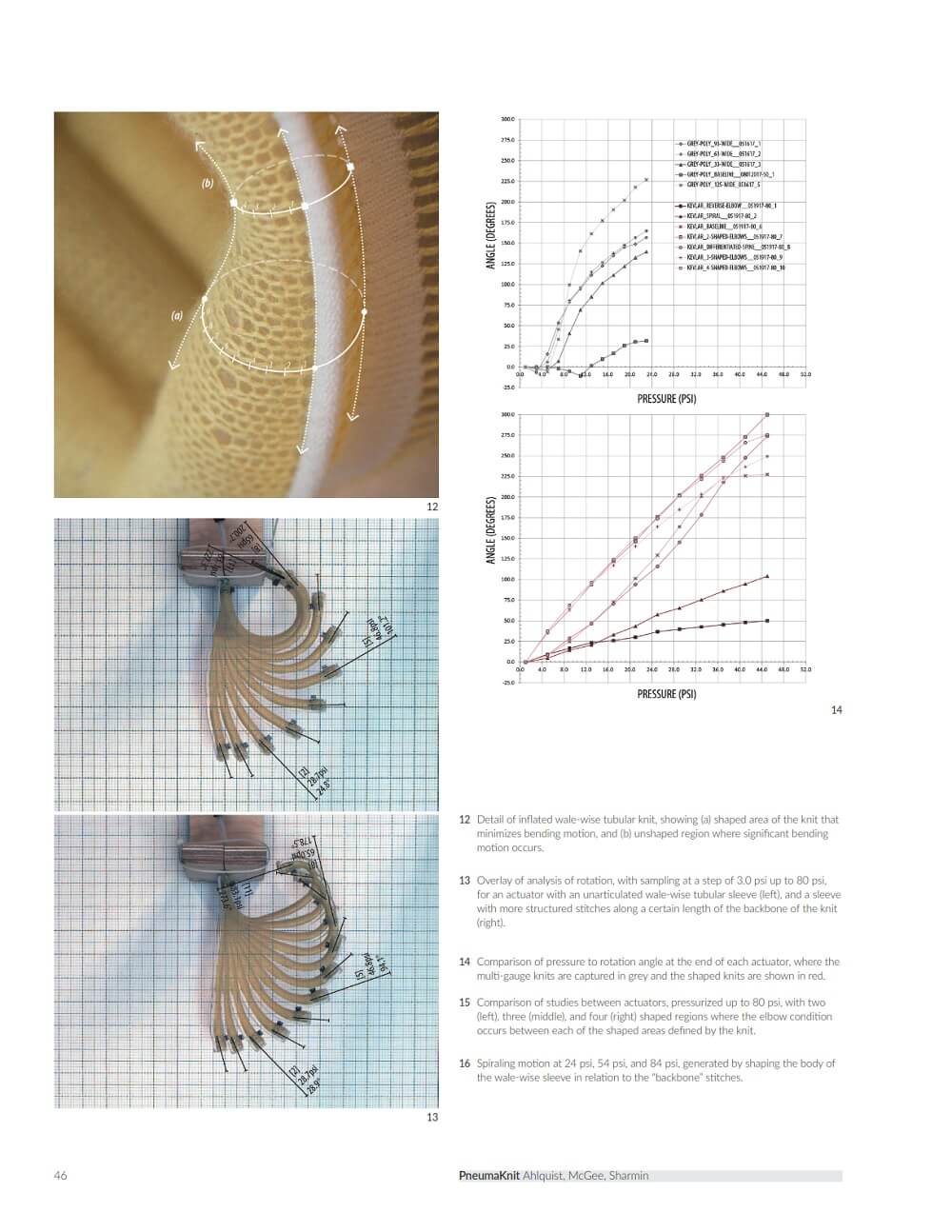
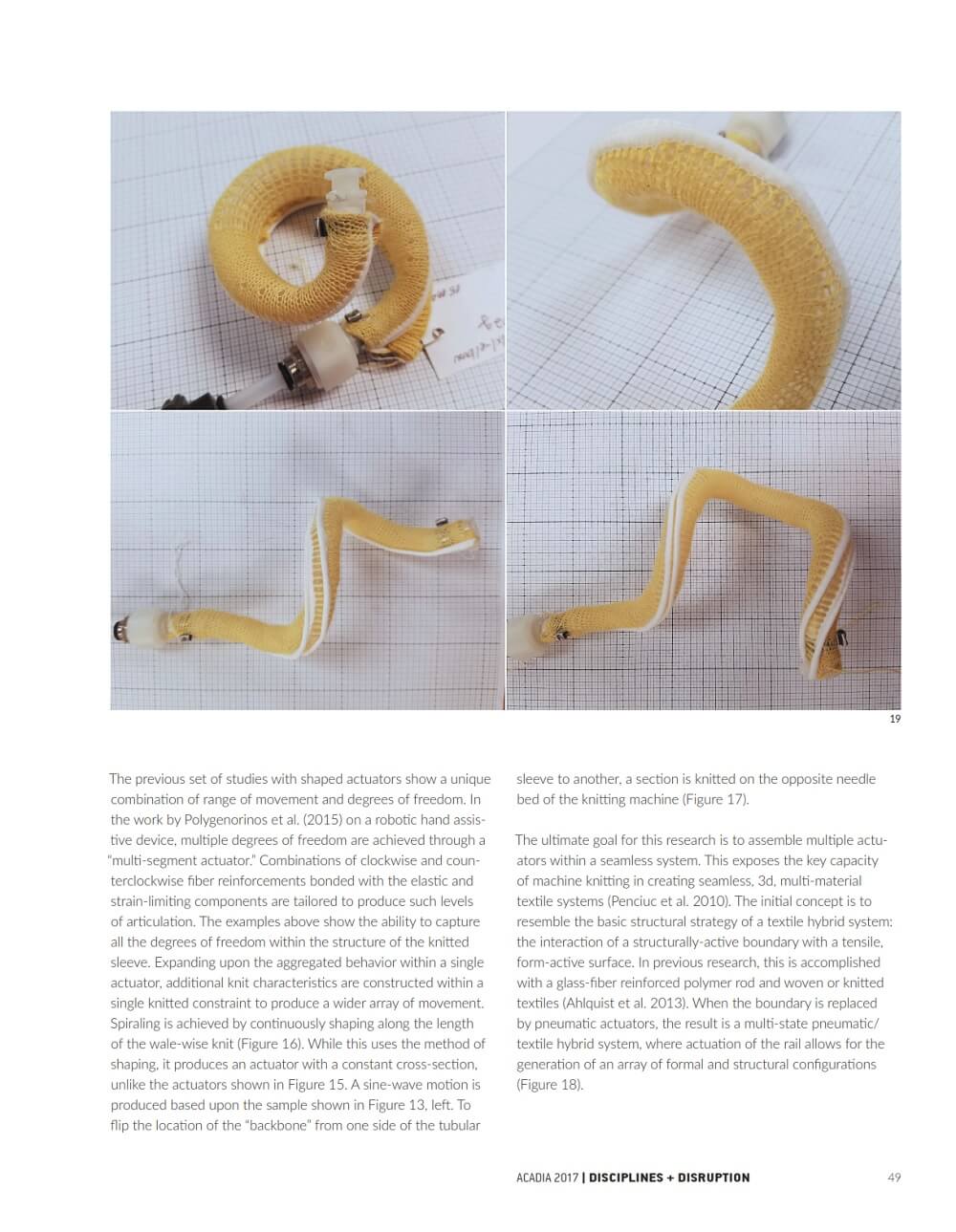
As opposed to molding silicone bladders, differentiation in motion is generated through the more facile ability of changing stitch structure, and shaping of the knitted textile sleeve, which constrains the standard silicone tubing. The relationship between knit differentiation, pneumatic pressure, and the resultant motion profile is studied initially with individual actuators, and ultimately in propositions for larger seamless assemblies. As opposed to a cellular study of individual components, this research proposes structures with multi-scalar articulation, from fiber and stitch to overall form, composed into seamless, massively deformable architectures.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







