Crease
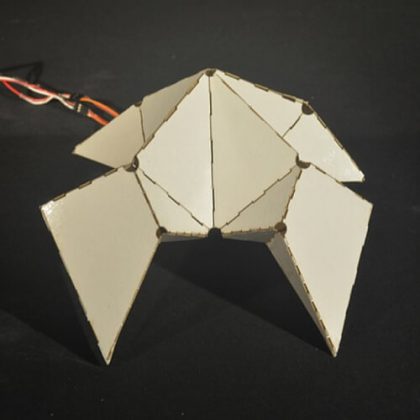
This research by Olga Mesa et al. continues to investigate the link between kinematics and pop-up origami structures in robotics. The objective was to design a robot that exhibited efficient and controlled locomotion minimizing number of motors.