
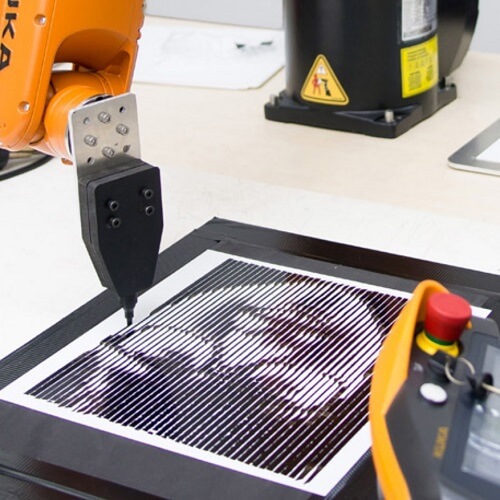
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
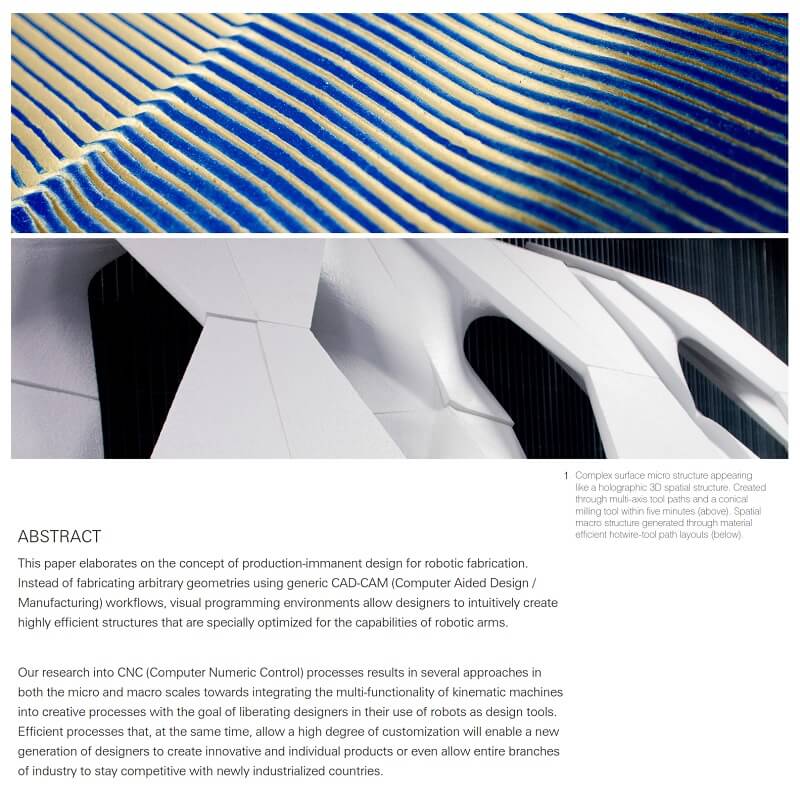
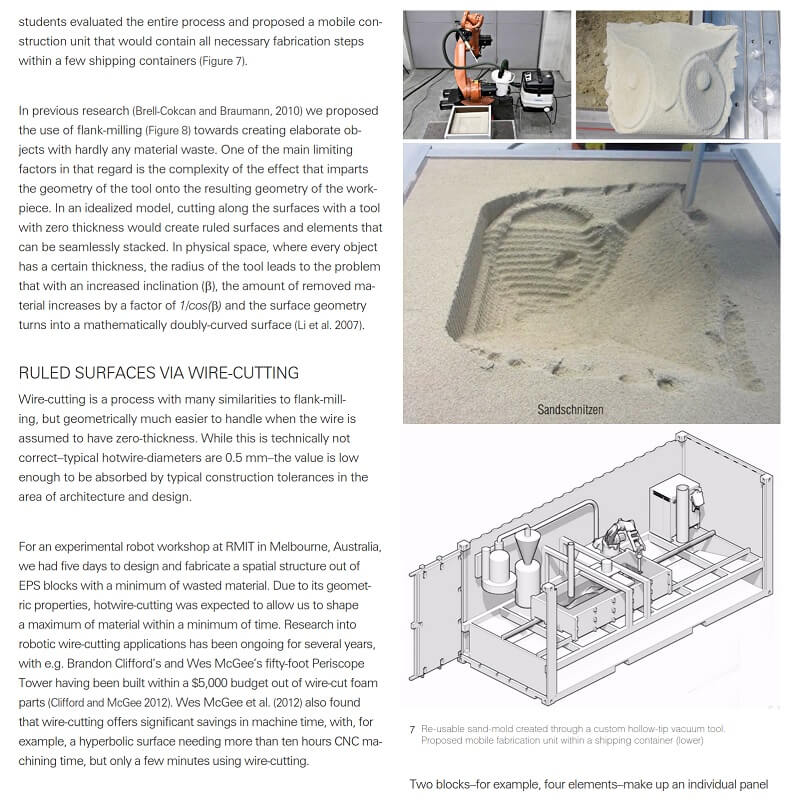
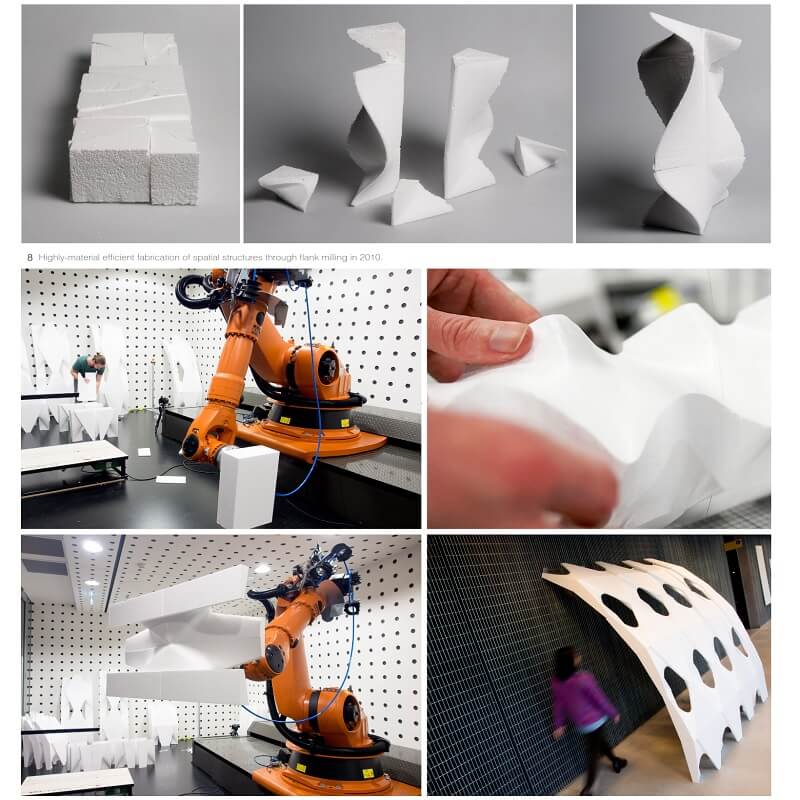
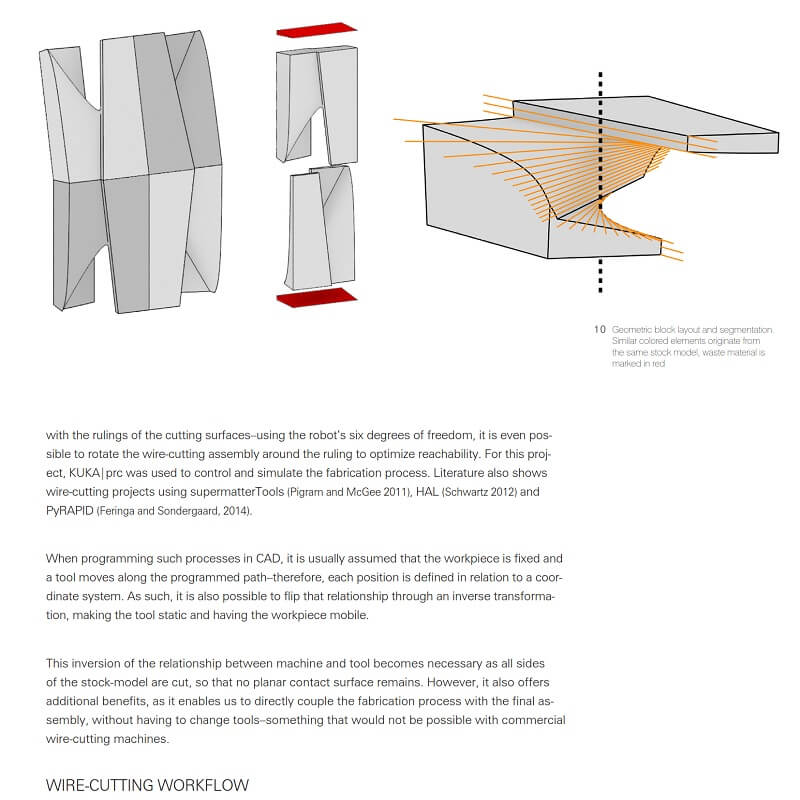
This paper by Sigrid Brell-Cokcan and Johannes Braumann, elaborates on the concept of production-immanent design for robotic fabrication. Instead of fabricating arbitrary geometries using generic CAD-CAM (Computer Aided Design / Manufacturing) workflows, visual programming environments allow designers to intuitively create highly efficient structures that are specially optimized for the capabilities of robotic arms.
This research into CNC (Computer Numeric Control) processes results in several approaches in both the micro and macro scales towards integrating the multi-functionality of kinematic machines into creative processes with the goal of liberating designers in their use of robots as design tools.
Efficient processes that, at the same time, allow a high degree of customization will enable a new generation of designers to create innovative and individual products or even allow entire branches of industry to stay competitive with newly industrialized countries.
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







