Spatial Wire Cutting
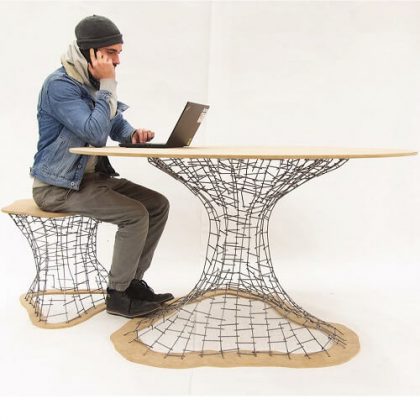
This thesis by Romana Rust, develops around a multi-robotic hot-wire cutting technique, that allows to significantly expand the set of possible hot-wire cutting geometries. This technique modulates the curvature of the hot-wire…


This thesis by Romana Rust, develops around a multi-robotic hot-wire cutting technique, that allows to significantly expand the set of possible hot-wire cutting geometries. This technique modulates the curvature of the hot-wire…
This thesis by Augusto Gandia, investigates computational design methods to tackle two of the most relevant challenges of robotically assembling spatial structures, which include the generation of collision-free robot paths and the handling of tolerance build-up.

In this paper, authors explore the various constraints in robotic fabrication and assembly processes, analyze their influence on design, and propose a methodology which bridges the gap between parametric design and robotic production.

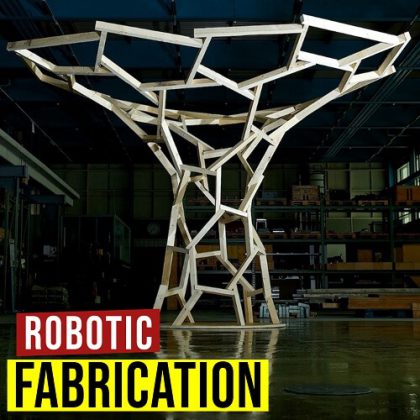
This paper by Andreas Thoma, David Jenny, Matthias Helmreich, Augusto Gandia, Fabio Gramazio and Matthias Kohler, presents a novel constructive system made solely of wood, enabled by a cooperative robotic fabrication process.

This paper, describes the implementation of a discrete in situ construction process using a location-aware mobile robot. An undulating dry brick wall is semi-autonomously fabricated in a laboratory environment set up to mimic a construction site.
In this paper, authors present a computational technique that aids with the design of structurally-sound metal frames, tailored for robotic fabrication using an existing process that integrates automated bar bending, welding, and cutting.

This article, presents one possible application, a novel fabrication process that combines large-scale robotic fused deposition modeling 3D printing with simultaneous casting of a fast-hardening, set-on-demand concrete.
This document by Enrico Pontello, Martin Tamke and Vasily Sitnikov, focuses on the exploration of casting complex concrete architectural elements with ice formwork.

In this thesis by Ardavan Bidgoli, author has investigated the architectural robotics opportunities by reviewing its design space and characteristics in academia and practice.
By integrating responsive sensing systems, this paper demonstrates real-time feedback loops that consider the spontaneous agency and intuition of the architect (or craftsperson) rather than the execution of static or predetermined designs.

This paper presents a number of novel computational and robotic fabrication techniques in designing, cutting and positioning. These techniques were explored through the robotic fabrication and assembly of a double-curved reciprocal frame wall.

This paper will explore how the Dougong components could be reinvented through the use of parametric tools and robotic fabrication methods and thus applied to contemporary architectural structures.

In this thesis by Molly Mason, author proposes the integration of robotic fabrication and assembly constraints into the design process to use as drivers for form-finding. The framework for this is created through codifying material processes and assembly logics.

This paper by Andrei Gheorghe, Philipp Hornung, Sigurd Reiss and Robert Vierlinger provides insight into a new robotic plastic forming process through the prototypical construction of a full scale structure.

Robots sliced the interlocking, curved wooden slats that form this sculptural bench, which is currently installed on the campus of the Vancouver’s University of British Columbia.
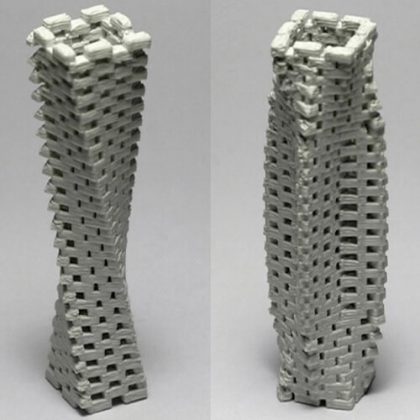
This paper presents methodology and implementation of parametric architectural design of bricklaying walls fabricated by industrial robotic arm. As a design tool Grasshopper is used, a visual programming editor that runs within the Rhinoceros 3D CAD application.

The Glass Vault is a joint effort between SOM and Princeton University c.r.e.A.te lab and Form Finding Lab, with assistance from the TU Delft Glass Group and is one of the SOM’s latest demonstration projects in automated robotic construction.
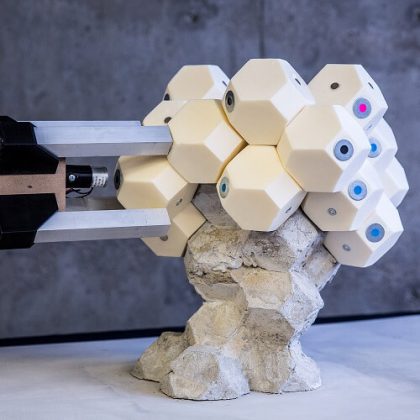
This paper by Samuel Leder, Ramon Weber, Lauren Vasey, Maria Yablonina and Achim Menges presents Voxelcrete, a discrete, voxel-based, reconfigurable slip formwork system for the creation of non-standard concrete structures.

This paper by Andrea Quartara and Angelo Figliola explores the process of digital materialization through robotic fabrication techniques by presenting three wooden projects.
This paper by Sigrid Brell-Cokcan and Johannes Braumann, elaborates on the concept of production-immanent design for robotic fabrication.

The Dragon Skin is a robotically fabricated temporary pavilion, installed at the University of British Columbia. It is the result of a workshop hosted by the School of Architecture and Landscape Architecture and the Centre for Advanced Wood Processing.

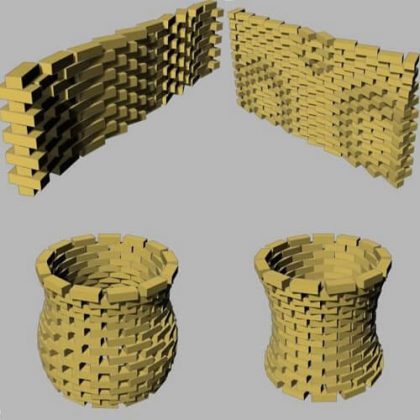
This thesis by Aleksandra Anna Apolinarska presents methods for designing novel types of timber bar structures arising from new robot-based fabrication and assembly processes.

the Faculty of Architecture at the University of Porto and the Institute for Systems and Computer Engineering, Technology and Science concluded a research project on the use of robotic fabrication technologies in architecture and building construction.

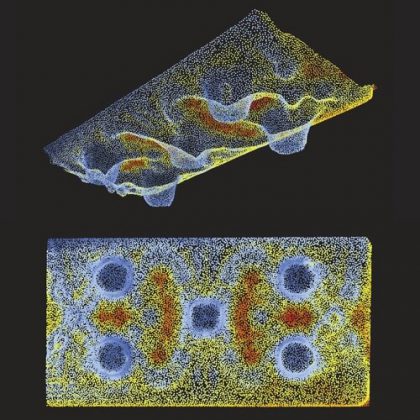
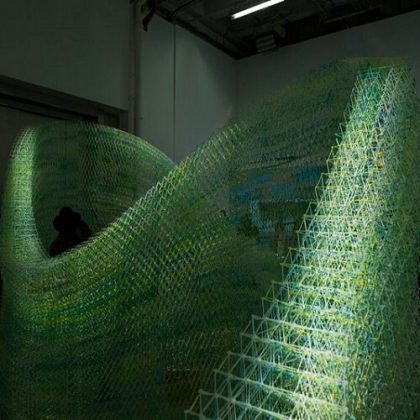
In this paper by Neri Oxman et al. the formation of non-woven fibre structures generated by the Bombyx mori silkworm is explored as a computational approach for shape and material optimization.
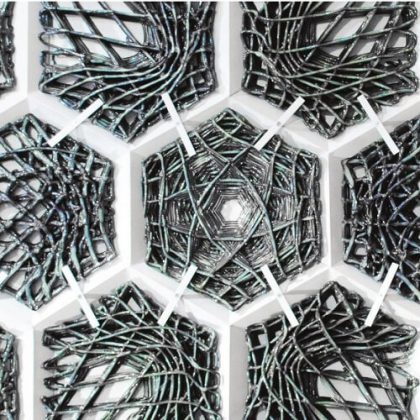
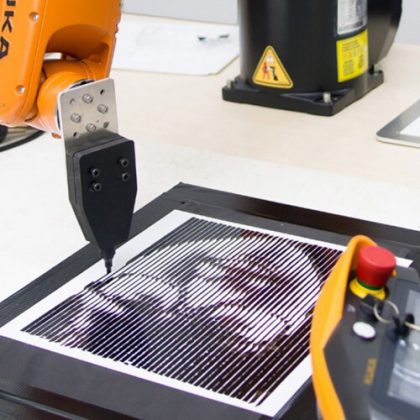
Iridescence Print by Gramazio Kohler Research is the first large-scale architectural installation to be automatically printed by robotic machines.

In this paper by Chi-Li Cheng and June-Hao Hou, authors attempt to develop a construction process which is suitable for all-terrain construction robot in the future. This construction process is inspired by beavers’ construction.

In this research by Shani Sharif, Varun Agrawal and Larry Sweet, authors present a system to allow designers to adaptively control an industrial robot from within a 3D modeling environment, for the purpose of real time feedback.

This study by Mads Brath Mads Brath and Avishek Das investigates the technological and methodological challenges in establishing an indeterministic approach to robotic fabrication that allows for a collaborative and creative design/fabrication process.
Robotic assembly technologies have been introduced in the field of architecture, opening new design and construction possibilities. This paper by Rui Oliveira and Jose Pedro Sousa intends to examine their application by examining how they can be used to connect with the traditions in brick construction.

This paper by Stephanie CHALTIEL and Maite BRAVO exposes the process for the implementation of new digital and physical methods for monolithic shells design and construction using digital fabrication techniques combined with enjoyable manual craft.