
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
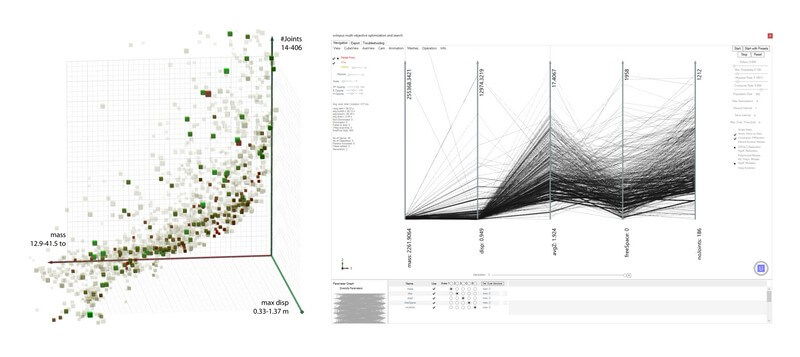
Octopus by Robert Vierlinger was originally made for Multi-Objective Evolutionary Optimization. It allows the search for many goals at once, producing a range of optimized trade-off solutions between the extremes of each goal. It is used and works similar to David Rutten’s Galapagos, but introduces the Pareto-Principle for Multiple Goals.
Based on SPEA-2 and HypE algorithm from ETH Zurich, also based on David Rutten’s Galapagos User Interface, Christoph Zimmel added the custom user interface and the hypervolume approximation. search for single goal + diversity of solutions, search for best trade offs between 2 to any number of goals, improve solutions by similarity-goals.
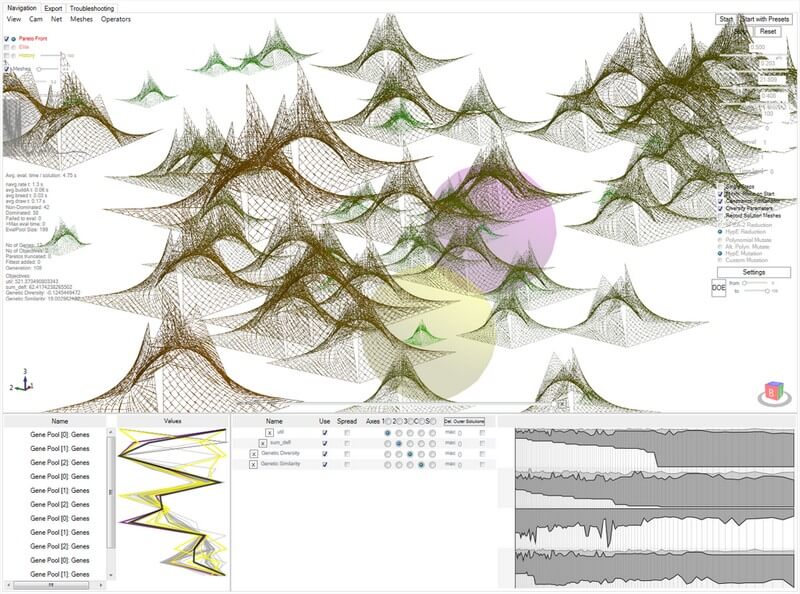
choose preferred solutions during a search, change objectives during a search, solutions’ 3d model in objective space for visual feedback, recorded history, save all search data within the Grasshopper document, save a solution as a Grasshopper State, export to text or text files.
Octopus now also includes:
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







