
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can
Robots are gaining popularity in architecture. Snohetta has recently purchased their own industrial robot, becoming one of the first architectural offices to adopt robot technology. As more and more architects are exposed to robotic fabrication, the need for easy interoperability, integration into architectural design tools and general accessibility will increase. Architects are discovering that industrial robots are much more than kinematic machines for stacking bricks, welding or milling – they are highly multifunctional and can be used for a huge variety of tasks.
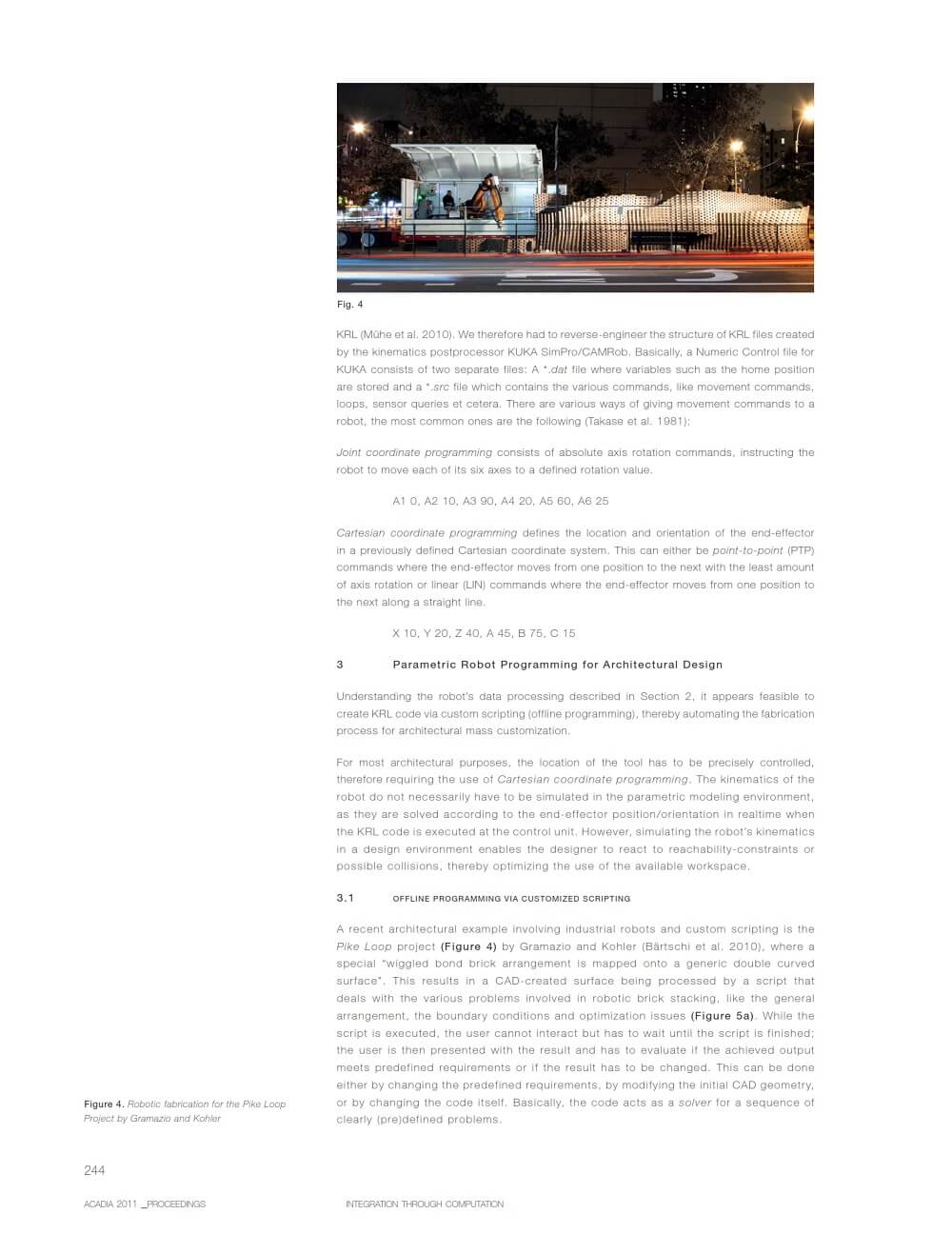
However, industry standard software does not provide easy solutions for allowing direct robot control right from CAAD (Computer Aided Architectural Design) systems. In this paper by Johannes Braumann and Sigrid Brell-Cokcan, authors will discuss existing methods of programming industrial robots, published architectural results (Gramazio and Kohler 2008) and the design of a new user interface that allows intuitive control of parametric designs and customized robotic mass production, by integrating CAM (Computer Aided Manufacturing) functions into CAAD.

String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







