
String Art Generator
String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

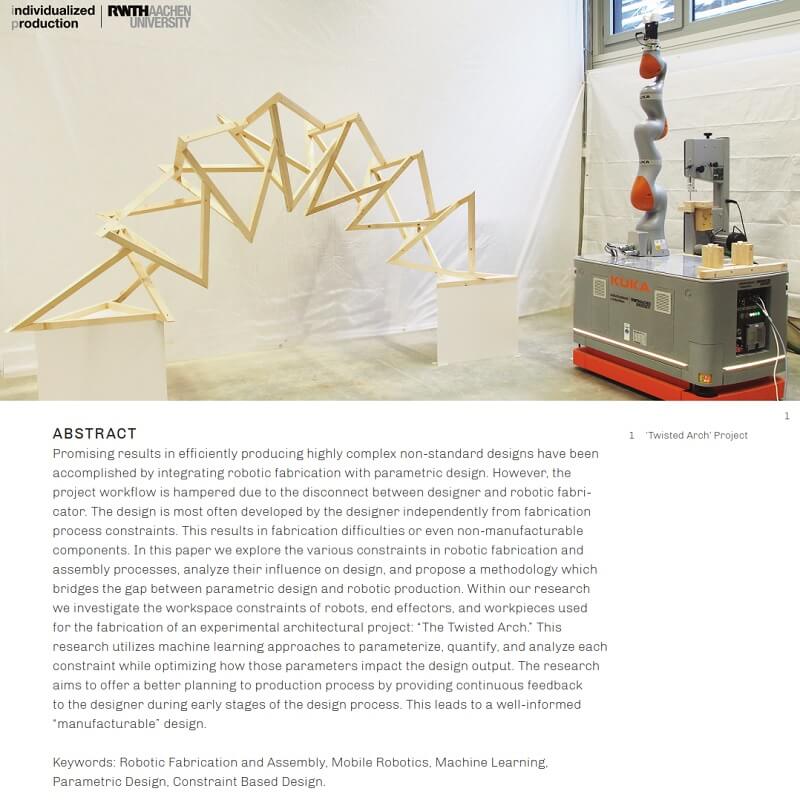
Promising results in efficiently producing highly complex non-standard designs have been accomplished by integrating robotic fabrication with parametric design. However, the project workflow is hampered due to the disconnect between designer and robotic fabricator. The design is most often developed by the designer independently from fabrication process constraints. This results in fabrication difficulties or even non-manufacturable components.
 In this paper by Pradeep Devadass, Tobias Heimig, Sven Stumm, Ethan Kerber and Sigrid Brell-Cokcan, authors explore the various constraints in robotic fabrication and assembly processes, analyze their influence on design, and propose a methodology which bridges the gap between parametric design and robotic production.
In this paper by Pradeep Devadass, Tobias Heimig, Sven Stumm, Ethan Kerber and Sigrid Brell-Cokcan, authors explore the various constraints in robotic fabrication and assembly processes, analyze their influence on design, and propose a methodology which bridges the gap between parametric design and robotic production.
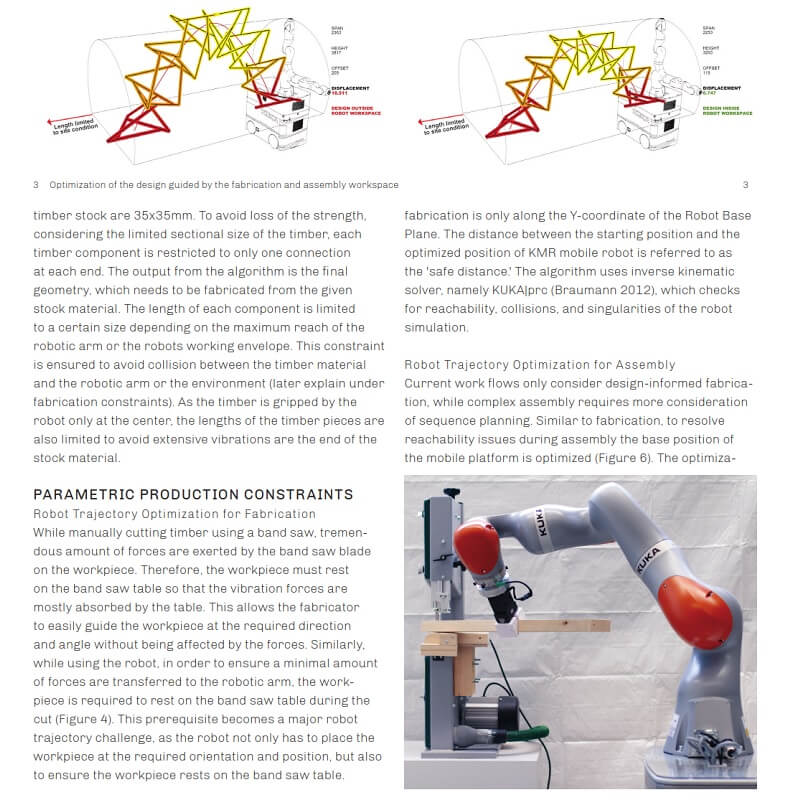
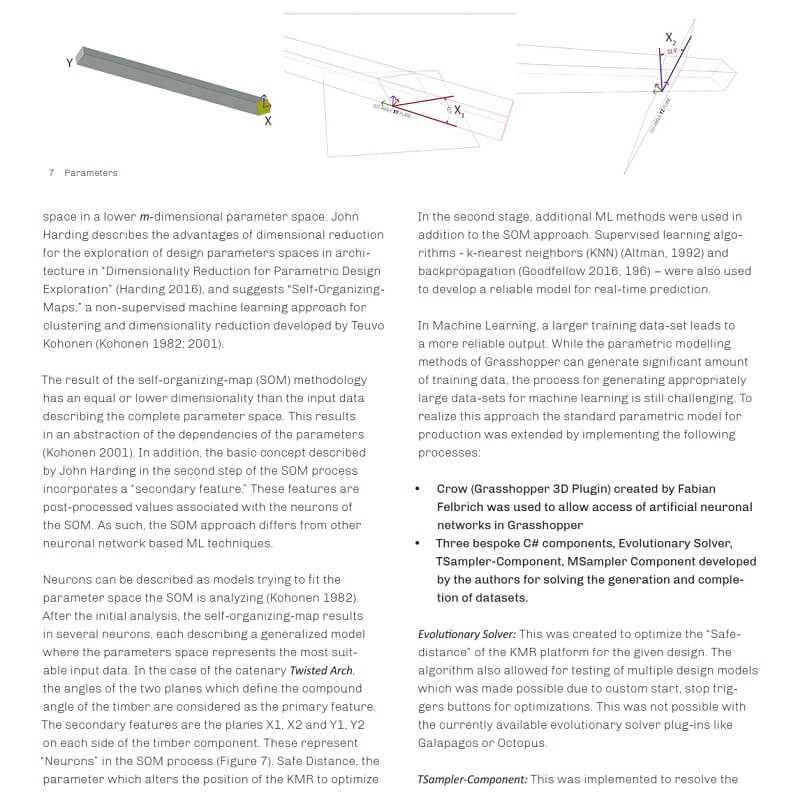
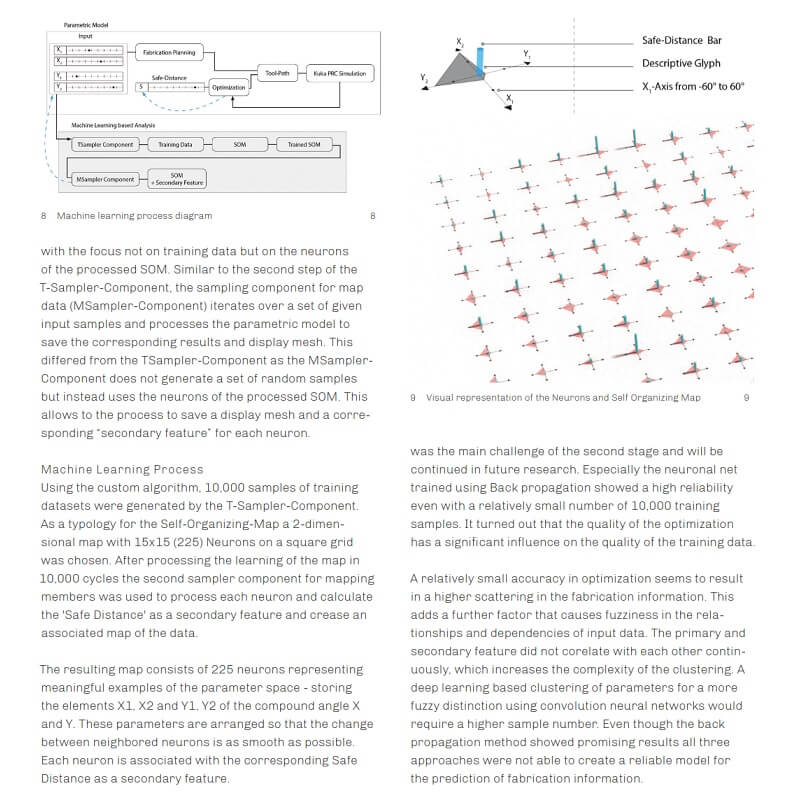
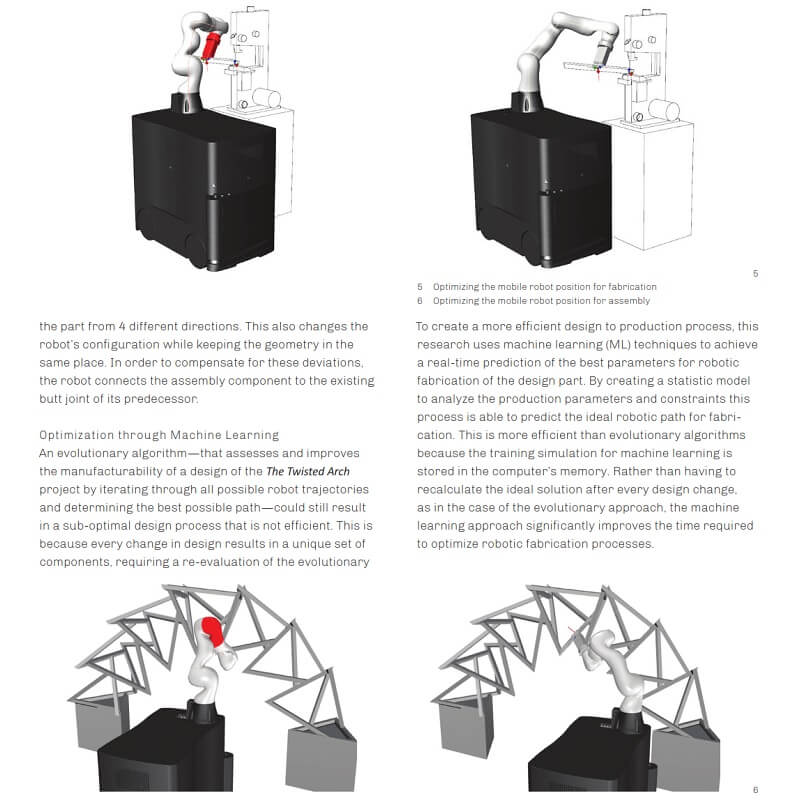 Within this research authors investigate the workspace constraints of robots, end effectors, and workpieces used for the fabrication of an experimental architectural project: “The Twisted Arch.” This research utilizes machine learning approaches to parameterize, quantify, and analyze each constraint while optimizing how those parameters impact the design output.
Within this research authors investigate the workspace constraints of robots, end effectors, and workpieces used for the fabrication of an experimental architectural project: “The Twisted Arch.” This research utilizes machine learning approaches to parameterize, quantify, and analyze each constraint while optimizing how those parameters impact the design output.
 The research aims to offer a better planning to production process by providing continuous feedback to the designer during early stages of the design process. This leads to a well-informed “manufacturable” design.
The research aims to offer a better planning to production process by providing continuous feedback to the designer during early stages of the design process. This leads to a well-informed “manufacturable” design.

String Art Generator by Yiran is a grasshopper plugin which generates a string art sequence based on an input image. You can

This paper by Alessandro Liuti, Sofia Colabella, and Alberto Pugnale, presents the construction of Airshell, a small timber gridshell prototype erected by employing a pneumatic formwork.

In this paper by Gregory Charles Quinn, Chris J K Williams, and Christoph Gengnagel, a detailed comparison is carried out between established as well as novel erection methods for strained grid shells by means of FE simulations and a 3D-scanned scaled physical model in order to evaluate key performance criteria such as bending stresses during erection and the distance between shell nodes and their spatial target geometry.

In this paper by Frederic Tayeb, Olivier Baverel, Jean-François Caron, Lionel du Peloux, ductility aspects of a light-weight composite gridshell are developed.







