16
May
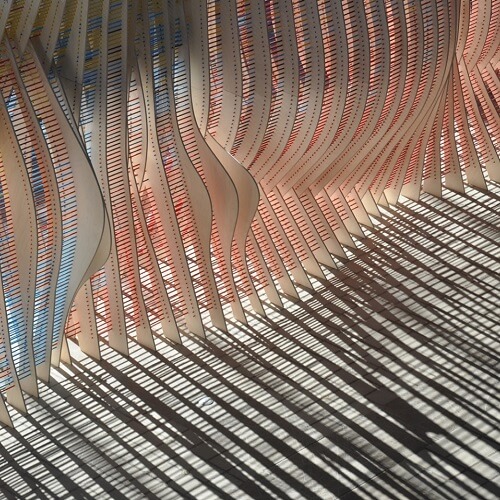
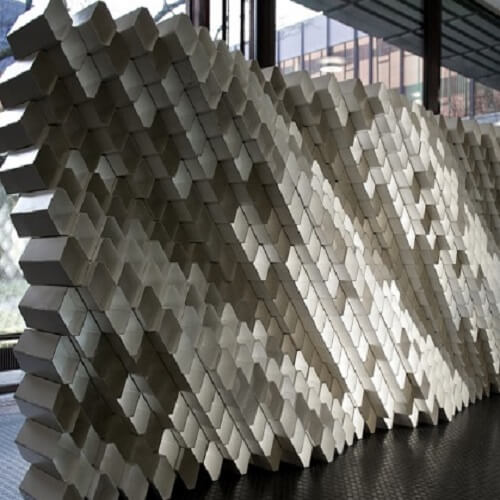
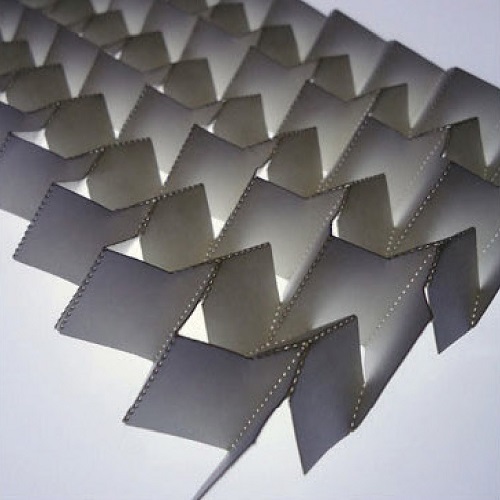
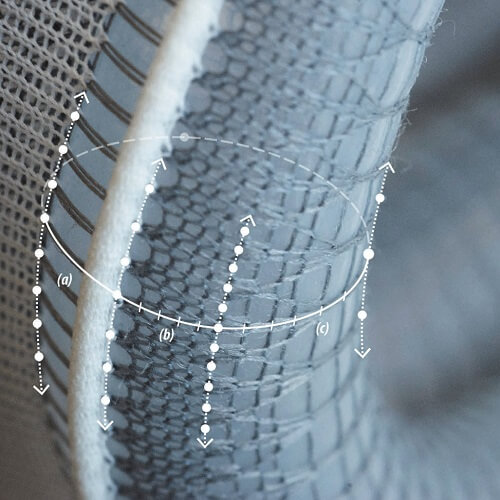
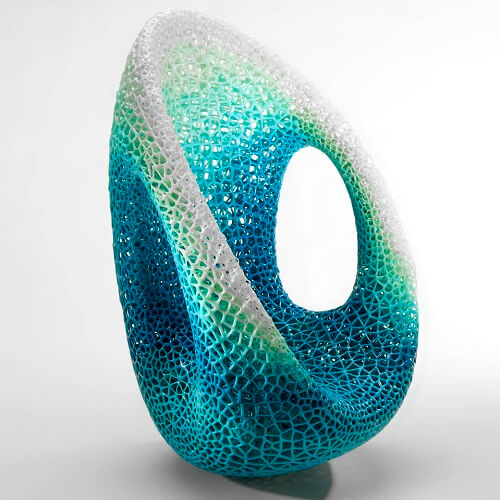
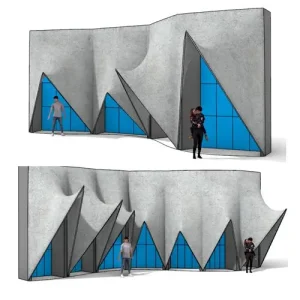
Responsive Architectural Skins
-
By
Admin
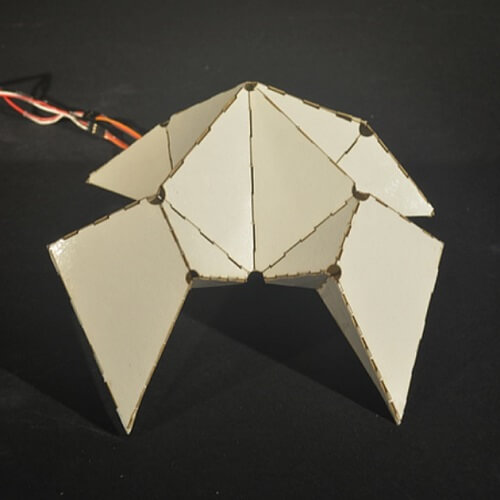
This paper by Sherif Abdelmohsen, Passaint Massoud and Ahmed Elshafei describes the process of designing a prototype for a soft responsive system for a kinetic building facade.